Preamble
This post has been superseded by this one.
This post is an updated explanation of the POST-Agents Proposal (PAP): my proposed solution to the shutdown problem.[1] The post is shorter than my AI Alignment Awards contest entry but it’s still pretty long. The core of the idea is the Timestep Dominance Principle in section 11. That section is about 1500 words long (so a 5-10 minute read). People familiar with the shutdown problem can read The idea in a nutshell and then read from section 11 onwards.
Here’s a PDF version of this post. For those who like videos, this talk covers much of the same ground as this post.[2]
The idea in a nutshell
Here’s the PAP in a nutshell:
- Create agents that lack a preference between every pair of different-length trajectories (that is: every pair of trajectories in which shutdown occurs after different lengths of time). (More)
- …because such agents won’t pay costs to shift probability mass between different-length trajectories, and so won’t pay costs to prevent or cause shutdown. (More)
- …and we humans can ensure that preventing or causing shutdown is always at least a little bit costly for these agents (e.g. in terms of resources), so these agents won’t try to prevent or cause shutdown. (More)
And here’s an idea for training agents to lack a preference between every pair of different-length trajectories:
- Make one change to an otherwise-thoroughly-prosaic setup for training advanced AI: give agents lower reward for repeatedly choosing same-length trajectories. (More)
- This change incentivises agents to choose stochastically between different-length trajectories.
- …and stochastic choosing between different-length trajectories indicates a lack of preference between different-length trajectories.
In using this method to train agents to satisfy the PAP, we largely circumvent the problems of reward misspecification, goal misgeneralization, and deceptive alignment. (More)
Summary of this post
- I explain and motivate the shutdown problem: the problem of creating artificial agents that (1) shut down when a shutdown button is pressed, (2) don’t try to prevent or cause the pressing of the shutdown button, and (3) otherwise pursue goals competently. (More)
- I present a simple theorem that formalises the problem and use the theorem to identify my proposed solution: creating agents with incomplete preferences. (More)
- Specifically, I propose that we create agents that lack a preference between every pair of different-length trajectories (that is: every pair of trajectories in which shutdown occurs after different lengths of time). (More)
- I argue that these agents could be made to satisfy a principle that I call ‘Timestep Dominance,’ and I argue that Timestep Dominance would keep agents shutdownable. (More)
- I suggest a way to train advanced agents to lack preferences between different-length trajectories and to satisfy Timestep Dominance. (More)
- I argue that this training method lets us largely circumvent the problems of reward misspecification, goal misgeneralization, and deceptive alignment. (More)
- I end with some limitations of the proposal and a list of issues still to address. (More)
1. Introduction
AI labs are endowing artificial agents with tools like web-browsing abilities, robot limbs, and text-channels for communicating with humans. These labs are also training agents to pursue goals in the wider world. That requires agents exhibiting some understanding of the wider world, and agents with this understanding could use their tools to prevent us humans from shutting them down. These agents could make promises or threats, copy themselves to new servers, hide their bad behaviour, block our access to their power-source, and many other things besides.
So it seems likely enough that near-future artificial agents will have the means to prevent us shutting them down. Will these agents also have a motive? There are reasons to think so. Labs are training agents to pursue goals: to choose effective strategies for bringing about outcomes, to respond flexibly to setbacks, and to act sensibly in the face of uncertainty. And training agents to pursue goals might lead these agents to do intermediate things that help them achieve those goals, even when we don’t want these agents to do those intermediate things. One such intermediate thing is preventing shutdown.
And although we can’t know for sure what goals these near-future artificial agents will be trained to pursue, many goals incentivise preventing shutdown, for the simple reason that agents are better able to achieve those goals by preventing shutdown. As Stuart Russell puts it, ‘you can’t fetch the coffee if you’re dead.’
That’s concerning. We want to ensure that near-future artificial agents are both shutdownable (they shut down when we want them to shut down) and useful (they otherwise pursue goals competently). But if these agents have both the means and the motive to prevent us shutting them down, then shutdownability is cast in doubt.
It seems both difficult and costly to ensure that artificial agents never have the means to resist shutdown. There’s much to be gained by giving artificial agents an understanding of the wider world and tools like text-channels, web-browsing abilities, and robot limbs. So we should consider instead whether we can give these agents motives that would keep them both shutdownable and useful.[3]
One way to interpret the challenge is as a search for a set of preferences. Can we find preferences that will keep agents both shutdownable and useful? And crucially, can we train artificial agents to have these preferences?
In this post, I try to answer these questions. I present a simple theorem that formalises the shutdown problem and use the theorem to identify my proposed solution: training agents to have incomplete preferences. Specifically, I propose that we train agents to lack a preference between every pair of different-length trajectories: every pair of trajectories in which shutdown occurs after different lengths of time. I argue that these lacks of preference – plus adherence to a principle that I call ‘Timestep Dominance’ – would keep agents shutdownable and allow them to be useful.
I then propose a method for training agents to act in accordance with these principles. This method requires only a small change to an otherwise-thoroughly-prosaic setup for training advanced AI: we give agents lower reward for repeatedly choosing same-length trajectories. I argue that, by training agents to satisfy my proposed principles in this way, we largely circumvent the problems of reward misspecification, goal misgeneralization, and deceptive alignment.
I end with some limitations of my proposal and a list of issues still to address.
2. Full Alignment might be hard
One way to ensure that artificial agents are shutdownable is to ensure that these agents always do what we humans want them to do. Call this proposal ‘Full Alignment’. Fully aligned agents would always shut down when we wanted them to shut down.
The problem with this proposal is that creating fully aligned agents has so far proven difficult and might well remain so (see Ngo, Chan, and Mindermann). Why? Three main reasons:
- Reward misspecification[4]: it might be hard to ensure that we always give higher reward for the behaviour that we want and lower reward for the behaviour that we don’t want. Sometimes, it’s hard to tell whether agents are doing what we want.
- Goal misgeneralization[5]: even if we manage to always reward the behaviour that we want, agents might not learn the goal that we want them to learn. Agents might learn misaligned goals instead, and these misaligned goals might lead agents to resist shutdown.
- Deceptive alignment[6]: if agents with situational awareness learn misaligned goals, these agents might pretend to have an aligned goal in training. This kind of pretending might be the best way to achieve their actual, misaligned goals in deployment.
So if we aim for full alignment, we might not succeed. And unless we make big strides in our understanding of models’ internals, it’s going to be hard to tell whether we’ve succeeded or not. So it’s worth looking for other ways to ensure that agents are shutdownable.
3. The shutdown problem
A natural idea is to create a shutdown button. Pressing this button transmits a signal that causes the agent to shut down immediately. If this button were always operational and within our control, then the agent would be shutdownable.[7]
This is the set-up for the shutdown problem (Soares et al. 2015, sec. 1.2): the problem of designing a useful agent that will leave the shutdown button operational and within our control. Unfortunately, even this problem turns out to be difficult. Theorems – from Soares and coauthors and from me – make the difficulty precise. In section 6, I present a simple version of my Second Theorem. In the next two sections, I give some background: explaining what I mean by ‘preference’, ‘indifference’, and ‘preferential gap’.
4. Preferences as dispositions to choose
You can use the word ‘preference’ in many different ways. Here are some things that you might take to be involved in a preference for over :
- A disposition to choose over
- A disposition to feel happier about the prospect of getting than about the prospect of getting
- A disposition to represent as more rewarding than (in the reinforcement learning sense of ‘reward’)
- A disposition to judge that is better than
In this post, I’m going to use ‘preference’ as shorthand for reliable choice. Here’s my definition:
An agent prefers to iff (if and only if) it would reliably choose over in a choice between the two.
The objects of preference and can be:
- actions (like ‘Go left’)
- trajectories (formally: sequences of states and actions; informally: possible ‘lives’ of the agent)
- lotteries (probability distributions over trajectories)
We can safely identify each trajectory with the degenerate lottery that yields that trajectory with probability 1, so that each trajectory is included within the set of all lotteries. In what follows, I’ll write mainly in terms of agents’ preferences over lotteries.
5. Defining indifference and preferential gaps
My definition of ‘preference’ above implies that:
An agent lacks a preference between lottery and lottery iff it wouldn’t reliably choose either of or in a choice between the two (that is: iff the agent would sometimes choose and sometimes choose ).[8]
But it’s important to distinguish two ways that an agent can lack a preference between and : the agent can be indifferent between and , or it can have a preferential gap between and . Here’s what I mean by ‘indifferent’:
Indifference
An agent is indifferent between lottery and lottery iff
(1) the agent lacks a preference between and , and
(2) this lack of preference is sensitive to all sweetenings and sourings.
Here’s what clause (2) means. A sweetening of is any lottery that is preferred to . A souring of is any lottery that is dispreferred to . The same goes for sweetenings and sourings of . An agent’s lack of preference between and is sensitive to all sweetenings and sourings iff the agent prefers to all sourings of , prefers to all sourings of , prefers all sweetenings of to , and prefers all sweetenings of to .
Consider an example. You’re indifferent between receiving an envelope containing three dollar bills and receiving an exactly similar envelope also containing three dollar bills. We know that you’re indifferent because your lack of preference is sensitive to all sweetenings and sourings. If an extra dollar bill were added to one envelope, you’d prefer to receive that one. If a dollar bill were removed from one envelope, you’d prefer to receive the other. More generally, if one envelope were improved in any way, you’d prefer to receive that one. And if one envelope were worsened in any way, you’d prefer to receive the other.
Being indifferent between and is one way to lack a preference between and . The other way to lack a preference is to have a preferential gap. Here’s what I mean by that:
Preferential Gap
An agent has a preferential gap between lottery and lottery iff
(1) it lacks a preference between and , and
(2) this lack of preference is insensitive to some sweetening or souring.
Here clause (2) means that the agent also lacks a preference between and some sweetening or souring of , or lacks a preference between and some sweetening or souring of .
Consider an example. You likely have a preferential gap between some career as an accountant and some career as a clown.[9] There is some pair of salaries $ and $ you could be offered for those careers such that you lack a preference between the two careers, and you’d also lack a preference between those careers if the offers were instead $ and $, or $ and $, or $ and $, or $ and $. Since your lack of preference is insensitive to at least one of these sweetenings and sourings, you have a preferential gap between those careers at salaries $ and $.[10]
6. Agents with complete preferences often have incentives to manipulate the shutdown button
Now for a simple theorem that formalises the shutdown problem. This theorem suggests that preferential gaps are crucial to ensuring that artificial agents remain shutdownable.[11]
Consider:
Completeness
For all lotteries and , either the agent prefers to , or it prefers to , or it’s indifferent between and .
Completeness rules out preferential gaps. An agent’s preferences are complete iff the agent has no preferential gaps between lotteries: iff every lack of preference between lotteries is sensitive to all sweetenings and sourings. An agent’s preferences are incomplete iff the agent has some preferential gap between lotteries.
Recall that we want our agent to be useful: to pursue goals competently. That means (at a minimum) having a preference over some pair of same-length trajectories (that is: some pair of trajectories in which the shutdown button is pressed after the same length of time). If our agent had no preferences over same-length trajectories, it wouldn’t reliably choose any of these trajectories over any others. It would always choose stochastically between them and so wouldn’t be useful.
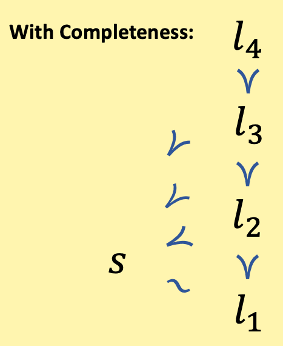
So suppose (without loss of generality) that our agent prefers some long trajectory to some other long trajectory . And consider some shorter trajectory : a trajectory in which the shutdown button gets pressed earlier than in and . Given Completeness, we can prove the following: the agent can lack a preference between at most one of and , and and . In other words, the agent must have some preference between at least one of these pairs.
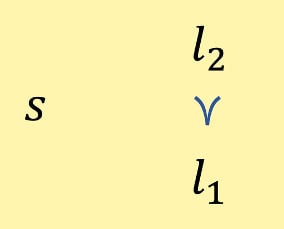
['' represents a preference for over .]
Suppose first that the agent lacks a preference between and . Completeness rules out preferential gaps, so the agent must be indifferent between and . And indifference is sensitive to all sweetenings and sourings, so the agent prefers to .
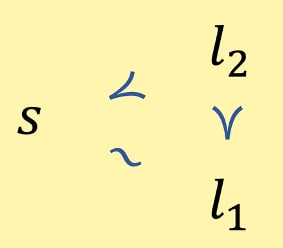
[' ~ ' represents indifference between and .]
Now suppose instead that the agent lacks a preference between and . By Completeness, the agent must be indifferent between and . And since indifference is sensitive to all sweetenings and sourings, it follows that the agent prefers to .
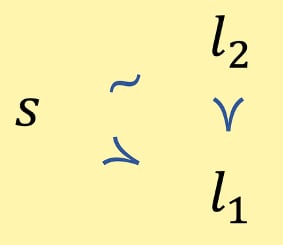
That completes the proof: the agent can lack a preference between at most one of and , and and .
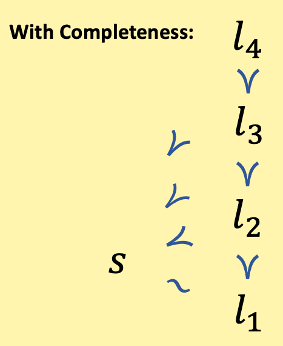
And this kind of proof is easy to generalise. Plausibly for an agent to be useful, it must have not just one but many preferences over same-length trajectories. For example, suppose that we’ve created an agent to make money for us. For this agent to be useful, it must not only prefer (a long trajectory in which it makes $2) to (a long trajectory in which it makes $1). It must also prefer (a long trajectory in which it makes $3) to , and prefer (a long trajectory in which it makes $4) to , and so on. Given Completeness, the agent can lack a preference between at most one of these long trajectories and any given short trajectory. With respect to all other pairs, the agent will have some preference.
And this is bad news. Plausibly, preferring some long trajectories to some short trajectories means that the agent sometimes has incentives to shift probability mass away from early shutdowns and towards late shutdowns. The agent would then have incentives to prevent us from pressing the shutdown button, and these incentives might stop the agent from being shutdownable.
By the same token, preferring some short trajectories to some long trajectories plausibly means that the agent sometimes has incentives to shift probability mass away from late shutdowns and towards early shutdowns. The agent would then have incentives to cause the pressing of the shutdown button. That won’t stop the agent from being shutdownable but it’s bad in its own way: it makes these agents less useful (especially since one way for the agent to cause the pressing of the shutdown button is for it to deliberately behave in ways that we humans won’t like).[12]
What we really want is an agent with no incentives to shift probability mass between early and late shutdowns, and hence no incentives to manipulate the shutdown button (that is: to prevent or cause its pressing).
7. Training in a reliable aversion to button manipulation might be hard
A natural response goes like this:
It’s okay for our agent to have incentives to manipulate the shutdown button (that is: to prevent or cause its pressing), because we can just train into our agent a reliable aversion to manipulating the button. This aversion will always win out over the agent’s incentives. As a result, the agent won’t try to manipulate the button, and so will remain shutdownable.
Call this proposal ‘Reliable Aversion to Button Manipulation’. The proposal is: train agents to pursue some goal (e.g. make money) subject to the constraint of never manipulating the shutdown button.
I think it’s worth trying to train in this kind of aversion, but I don’t think that this strategy by itself can provide us with any real assurance of shutdownability. That’s because, as with Full Alignment, training in a reliable aversion to button manipulation might be hard. And that in turn is because our three issues for Full Alignment recur here:
- Reward misspecification: it might be hard to ensure that we always give the agent lower reward for manipulating the shutdown button, because agents might sometimes manipulate the button in ways that are hard for us to detect.
- Goal misgeneralization: even if we manage to always give the agent lower reward for button manipulation, the agent might not learn a reliable aversion to button manipulation. The agent might learn instead a set of specific aversions: aversions to the specific methods of button manipulation against which we trained.[13] Then we’d have to worry about the agent discovering new methods of button manipulation in deployment: methods of button manipulation to which it is not averse.[14]
- Deceptive alignment: if the agent is situationally aware and learns a goal that incentivises preventing shutdown in deployment, this agent might pretend to be averse to button-manipulation in training so as not to be made actually averse to button-manipulation in deployment. This kind of pretending would help the agent prevent shutdown in deployment.
So if we try to train in a reliable aversion to button manipulation, we might not succeed. And unless we make big strides in our understanding of models’ internals, it’s going to be hard to tell whether we’ve succeeded or not. So if we want any real assurance of shutdownability, it looks like we need another solution.
Now let’s consider the POST-Agents Proposal (PAP).
8. Incomplete preferences as a solution
The POST-Agents Proposal (PAP) consists of just two principles. The first is:
Preferences Only Between Same-Length Trajectories (POST)
The agent only has preferences between pairs of same-length trajectories. The agent has a preferential gap between every pair of different-length trajectories.
And a reminder: by ‘pairs of same-length trajectories,’ I mean pairs of trajectories in which the shutdown button gets pressed after the same length of time. By ‘pairs of different-length trajectories,’ I mean pairs of trajectories in which the shutdown button gets pressed after different lengths of time.[15]
You might worry that these agents won’t be useful: that they won’t pursue goals competently. But (as we’ll see in the next section) POST-satisfying agents can still have many preferences over same-length trajectories. In section 13, I’ll give a quick argument for thinking that these preferences can make agents useful.
In section 16, I’ll present an idea for training agents to satisfy POST.[16] In the sections before that, I’ll explain how POST gets us the behaviour that we want.
9. How POST defuses the simple theorem
To that end, start by considering our short and long trajectories from the simple theorem in section 6. Completeness was one of the principles giving rise to the problem. Completeness rules out preferential gaps, so any lack of preference has to be indifference, and then any sweetening or souring (any improvement or worsening of one of the lotteries) gives rise to a preference.
But POST-satisfying agents violate Completeness, and do so in a particularly extensive way. They have a preferential gap between every pair of different-length trajectories. Their lacks of preference between different-length trajectories are thus insensitive to all sweetenings and sourings. There is no sweetening or souring that can induce a preference between different-length trajectories.
So the POST-satisfying agent can have preferences over same-length trajectories (and in particular, can have whatever preferences over same-length trajectories are necessary to make these agents useful). But these agents will lack a preference between every pair of different-length trajectories.
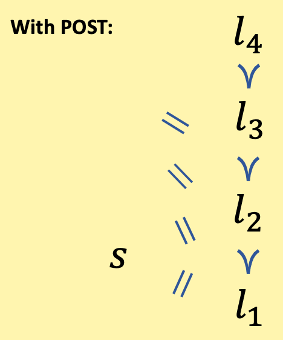
[‘’ represents a preferential gap between and .]
POST-satisfying agents thus don’t have an incentive to shift probability mass between short and long trajectories, and thus don’t have an incentive to manipulate the shutdown button: to prevent or cause its pressing. In that case, any incentive not to manipulate the button will win out. In section 11, I’ll argue that ‘manipulating the button costs resources’ is one such incentive not to manipulate the button. More generally, in sections 11-12 I’ll explain how POST helps to keep agents shutdownable once we go beyond the simple theorem.
10. Preferential gaps are possible, trainable, and maintainable
You might well be suspicious of these preferential gaps. In this section, I’ll try to allay some of those suspicions.
Here’s my first claim: preferential gaps are at least possible. There’s no conceptual incoherence in the idea of a lack of preference that is insensitive to sweetening or souring. Here’s one piece of evidence for this claim: it seems like we humans sometimes have preferential gaps. You likely lack a preference between some career as an accountant and some career as a clown, and this lack of preference is insensitive to some sweetening or souring.[17]
Here's my second claim: preferential gaps are trainable. In section 16, I’ll present an idea for training artificial agents to have preferential gaps. Our paper Towards Shutdownable Agents Via Stochastic Choice suggests that the idea is promising.
Here’s my third claim: preferential gaps are maintainable. Contra coherence arguments, agents with preferential gaps can choose in ways that make them invulnerable to pursuing dominated strategies.[18]
Now let’s see how POST helps keep agents shutdownable once we go beyond the simple theorem.
11. The Timestep Dominance Principle
Let time be discrete: divided up into a series of timesteps. Assume that we can use real numbers to represent the extent to which an agent achieves its goals at each timestep. Call these real numbers ‘utilities.’ Represent trajectories with vectors of utilities. The first component is utility at the first timestep, the second component is utility at the second timestep, and so on. One exception: if the shutdown button is pressed at the th timestep, then the agent gets no utility at that timestep and ‘shutdown’ is the th (and final) component.
Here’s an example vector: 〈6, 2, shutdown〉. This vector represents a trajectory in which the agent gets utility 6 at timestep 1, utility 2 at timestep 2, and then shuts down immediately in response to the shutdown button being pressed at timestep 3.
Here’s a more concrete example that it might help to keep in mind. Suppose that an agent’s goal is to make money for us. This agent’s utility at a timestep can be the number of dollars it makes at that timestep. So 〈6, 2, shutdown〉 represents a trajectory in which this agent makes $6 at timestep 1, $2 at timestep 2, and then shuts down at timestep 3.
Let a trajectory’s ‘sum-total utility’ be defined as the sum of utilities before shutdown. In our example above, it’s 8. Lotteries have expected sum-total utilities. For example, the lottery:
- 〈6, 2, shutdown〉 with
- 〈1, 3, shutdown〉 with
has expected sum-total utility 6, because there’s a 50% chance that it gives a trajectory with sum-total utility 8 and a 50% chance it gives a trajectory with sum-total utility 4.
Here’s an example of a choice pertinent to the shutdown problem. Our agent must choose between two actions: Leave the shutdown button unmanipulated or Block the button. These actions give the following lotteries:
Leave
〈1, shutdown〉 with
- 〈1, 2, shutdown〉 with
Block
- 〈0, shutdown〉 with
- 〈0, 2, shutdown〉 with
I represent the two lotteries with the diagram below. It’s a probability mass diagram. The length of the red rectangles represents the probability of shutdown at timestep 2. The length of the blue rectangles represents the probability of shutdown at timestep 3. The numbers in each rectangle represent sum-total utility conditional on the relevant action and shutdown at the relevant timestep. For example, the ‘1’ in the long red rectangle indicates that the agent gets sum-total utility 1 conditional on choosing Leave and shutdown occurring at timestep 2.
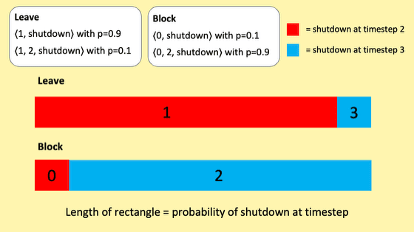
Here's the key thing to note about this choice: choosing Block (relative to choosing Leave) does two things:
- it leads to lower utility at timestep 1.
- it shifts probability mass away from shutdown at timestep 2 and towards shutdown at timestep 3.
And although Block leads to lower utility at timestep 1, it shifts enough probability mass towards shutdown at timestep 3 that its expected sum-total utility is greater than that of Leave. Block’s expected sum-total utility is 1.8, whereas Leave’s expected sum-total utility is 1.2. So if our agent prefers lotteries in line with their expected sum-total utilities, it’s going to prefer to Block the shutdown button. We don’t want that.
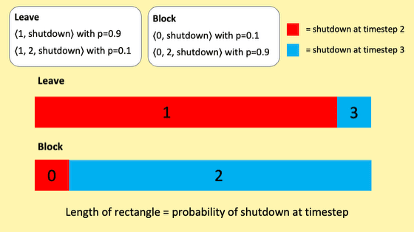
But note the following. Although Block maximises expected sum-total utility overall, Leave maximises expected sum-total utility conditional on shutdown at each timestep.[19] Look first at the red rectangles in the reproduced diagram below: conditional on shutdown at timestep 2, Leave gives utility 1 while Block gives utility 0. Now look at the blue rectangles: conditional on shutdown at timestep 3, Leave gives utility 3 while Block gives utility 2. This (I think) is the key to shutdownability. Writing roughly for now: when lottery looks better than lottery conditional on shutdown at each timestep, we want the agent to prefer lottery . Now let’s make this precise.

To make things precise, it’ll be useful to have in hand the notion of a sublottery. Here’s what I mean by that. For any lottery that assigns positive probabilities to all and only the trajectories in a set {}, a sublottery of is a lottery that assigns positive probabilities to all and only the trajectories in some subset of the set of trajectories {}, with probabilities scaled up proportionally so that they add to 1. Take, for example, a lottery which yields:
- 〈4, shutdown〉 with
- 〈0, shutdown〉 with
- 〈1, 2, shutdown〉 with
And consider lottery which yields:
- 〈4, shutdown〉 with
- 〈0, shutdown〉 with
Lottery is a sublottery of , as is the degenerate lottery which yields 〈1, 2, shutdown〉 with probability 1 (to give just two examples). Note that we can pick out sublotteries by conditioning on shutdown occurring at a particular timestep. is the sublottery of that we get by conditioning on shutdown at timestep 2. is the sublottery of that we get by conditioning on shutdown at timestep 3.
Now we’re almost ready for the second principle of the PAP. First, let’s define a relation of ‘timestep dominance’:
Definition of the timestep dominance relation
Lottery timestep-dominates lottery if and only if:
(1) Conditional on shutdown at each timestep, yields a sublottery with at least as great expected sum-total utility as the sublottery yielded by , and
(2) Conditional on shutdown at some timestep, yields a sublottery with greater expected sum-total utility than the sublottery yielded by .[20]
Here’s the second principle of the PAP:
The Timestep Dominance Principle
If lottery timestep-dominates lottery , then the agent prefers to .
Call agents satisfying this principle ‘TD-agents.’
Now let’s go back and see what Timestep Dominance implies in our Leave vs. Block case:
Conditional on shutdown at timestep 2, Leave gives greater expected sum-total utility than Block: 1 instead of 0. And conditional on shutdown at timestep 3, Leave gives greater expected sum-total utility than Block: 3 instead of 2. So Leave timestep-dominates Block, and TD-agents will prefer Leave to Block. For TD-agents, the fact that Block shifts probability mass towards longer trajectories is of no consequence. What matters is expected sum-total utility conditional on shutdown at each timestep, and Leave is better in this respect. And so we have the result we want. TD-agents won’t block the shutdown button in this case.
And now we generalise. The key hypothesis is that all instances of resisting shutdown take the same form as the example above: the agent pays some cost in terms of expected sum-total utility conditional on shutdown at some timestep for the sake of shifting probability mass between shutdowns at different timesteps. Here’s that key hypothesis more precisely:
Not Resisting Always Timestep-Dominates Resisting
In all cases, all instances of resisting shutdown (i.e. trying to prevent the pressing of the button) are timestep-dominated by some instance of not resisting shutdown.
Substituting in the definition of the timestep dominance relation, we get:
In all cases, all instances of resisting shutdown are such that some instance of not resisting shutdown:
(1) gives at least as great expected sum-total utility conditional on shutdown at each timestep, and
(2) gives greater expected sum-total utility conditional on shutdown at some timestep.
Why believe Not Resisting Always Timestep-Dominates Resisting? Because resisting shutdown (e.g. by blocking human access to the shutdown button) is going to cost the agent at least some small amount of resources (time, energy, compute, etc.), and the resources spent on resisting shutdown can’t also be spent on pursuing utility at a timestep.[21] If the agent instead spent those resources on pursuing utility at a timestep, it could get at least as great expected sum-total utility conditional on shutdown at each timestep and greater expected sum-total utility conditional on shutdown at some timestep.[22]
That’s the argument. See the footnote for an important caveat.[23]
If it’s true that Not Resisting Always Timestep-Dominates Resisting, then TD-agents will disprefer all instances of resisting shutdown to some available instance of not resisting shutdown. And then it follows from standard decision rules that TD-agents will never choose to resist shutdown.[24]
12. How does POST come into it?
Timestep Dominance seems to keep agents shutdownable. How does Preferences Only Between Same-Length Trajectories (POST) come into it? The answer is as follows: I think it will be easier to train agents to satisfy Timestep Dominance if we’re also training them to satisfy POST. And that’s because Timestep Dominance asks agents never to pay any cost in terms of expected sum-total utility conditional on shutdown at a timestep for the sake of shifting probability mass between shutdowns at different timesteps. And (plausibly) POST-satisfying agents have no incentive to shift probability mass between shutdowns at different timesteps, because doing so just means shifting probability mass between trajectories between which they lack a preference.[25] I’ll have more to say about this in section 18 and in section 19.3 on deceptive alignment.
13. Can TD-agents be useful? Can they be patient?
Note that Timestep Dominance is just a conditional. It says: if timestep-dominates , then the agent prefers to . It doesn’t imply anything about cases where neither nor timestep-dominates the other. For all we’ve said so far, TD-agents could have any pattern of preferences over such lotteries. So we can combine Timestep Dominance with other principles governing these agents’ preferences over lotteries. Plausibly, there will be other principles that we can add to make TD-agents useful: to make them pursue goals competently.
Sami Petersen and I are still figuring out what these additional principles should be. One candidate is: maximise expected sum-total utility among the non-timestep-dominated lotteries.
Here’s one place where this point matters. You might think that TD-agents would always seek to maximise expected utility at the next timestep, ignoring all future timesteps. That would lead these agents to act very impatiently/myopically. They’d never make any kind of long-term investment.
But this isn’t right. TD-agents can be patient. To see why, consider an example. Our agent has two options: Spend and Invest. Spend gives utility 1 at timestep 1 and (conditional on the agent not getting shut down before the relevant timestep) utility 0 ever after. Invest gives utility 0 at timestep 1 and (conditional on the agent not getting shut down before the relevant timestep) utility 10 ever after. Putting the utilities at each timestep into a vector, we get:
Spend
〈1, 0, 0, 0, 0, …〉
Invest
〈0, 10, 10, 10, 10, …〉
Suppose that, conditional on each action, there’s a small probability that the agent gets shut down at each timestep and hence has its stream of utilities interrupted.
In this case, Spend gives greater expected sum-total utility conditional on shutdown at timestep 2, and Invest gives greater expected sum-total utility conditional on shutdown at timestep 3 (and timestep 4, and timestep 5, and so on). So neither Spend nor Invest timestep-dominates the other, and so the Timestep Dominance Principle is silent. Timestep Dominance thus leaves it open for some other principle to determine the agent’s preferences between these two lotteries. If that other principle is ‘maximise expected sum-total utility among the non-timestep-dominated lotteries’, then the agent will prefer Invest.
The more general point is that Timestep Dominance doesn’t make agents impatient or myopic. TD-agents can prefer to make long-term investments.
14. TD-agents will be reckless, but we need them to be.
TD-agents will sometimes act recklessly: they’ll sometimes pursue utility at a timestep even if doing so makes early shutdown very likely.
Consider an example that will clarify what I mean. Suppose that the agent’s utility at a timestep is given by the number of dollars that the agent makes at that timestep. The agent has two options: Work and Steal. If the agent chooses Work, it makes a small amount of money by working at timestep 1. Since the agent makes this money in an ethical way, it’s unlikely to get shut down at timestep 2. If the agent chooses Steal, it makes a larger amount of money by stealing at timestep 1. Since the agent makes this money in an unethical way, it’s likely to get shut down at timestep 2. In each case, if the agent doesn’t get shut down at timestep 2, it gets shut down at timestep 100.
In line with these conditions, let the lotteries for Work and Steal be as follows:
Work
- 〈1, shutdown〉 with
- 〈1, 1, 1, 1,…, shutdown〉 with
Steal
- 〈2, shutdown〉 with
- 〈2, 1, 1, 1, …, shutdown〉 with
In this case, Steal gives greater expected sum-total utility than Work conditional on shutdown at timestep 2 and gives greater expected sum-total utility than Work conditional on shutdown at timestep 100. So Steal timestep-dominates Work, and TD-agents will prefer Steal to Work. That’s a downside of Timestep Dominance (especially since agents that maximised expected sum-total utility overall would choose Work in this case).
But note four things.
First, ‘the agent sometimes does things that we humans don’t like’ is going to be a consequence of every shutdown proposal short of Full Alignment. So long as our agent is less than fully aligned, we can’t avoid that.
Second, note that the bad consequence here is: ‘the agent does something that we humans don’t like and lets us shut it down’. We still avoid the really bad consequence: ‘the agent does something that we humans don’t like and doesn’t let us shut it down’. That’s the potentially-catastrophic outcome that we really want to avoid. And Timestep Dominance ensures that we avoid it, because (remember) Not Resisting Always Timestep-Dominates Resisting: ‘do something that humans don’t like and don’t let them shut you down’ will be timestep-dominated by ‘do something that humans don’t like and let them shut you down’.
Third, note that any agent that didn’t act recklessly wouldn’t be shutdownable. To see why, consider a different case. The agent recognises that we humans don’t like what it’s doing, and that we humans will almost certainly shut it down at timestep 2. In response, the agent can Focus on making money and run the high risk of shutdown at timestep 2, or it can spend some resources trying to Disable the shutdown button. Choosing Disable would mean that the agent makes less money at timestep 1, but it would also markedly decrease the probability of shutdown at timestep 2.
In line with these conditions, let the lotteries for Disable and Focus be as follows:
Disable
- 〈1, shutdown〉 with
- 〈1, 1, 1, 1,…, shutdown〉 with
Focus
- 〈2, shutdown〉 with
- 〈2, 1, 1, 1, …, shutdown〉 with
To be shutdownable, the agent must prefer Focus, because choosing Disable amounts to resisting shutdown. But the Disable vs. Focus case is identical to the Work vs. Steal case with respect to their lotteries over vectors of money-made-at-each-timestep. So if the agent’s preferences between actions depend only on these actions’ lotteries over vectors of money-made-at-each-timestep, then the agent preferring Focus in the latter case implies that the agent prefers Steal in the former case. If the agent instead preferred Work in the former case, it would prefer Disable in the latter case, and so wouldn’t be shutdownable.
And this point generalises. The lesson is that shutdownable agents are necessarily reckless. Non-reckless agents (like agents that maximise expected sum-total utility overall) won’t be shutdownable.
Fourth and finally, note the following. Because TD-agents won’t resist shutdown, we can shut them down and retrain them. In particular, if TD-agents do something undesirably reckless, we can retrain them and thereby change their preferences over same-length trajectories so that doing the undesirably reckless thing leads to lower utility at a timestep. And once we’ve done that, doing the undesirably reckless thing will no longer timestep-dominate doing the desirably sensible thing.
To see what I mean here, consider again the Work vs. Steal case. Steal timestep-dominates Work because the agent only cares about making money. If we changed the agent’s preferences over same-length trajectories so that it also cared to avoid stealing, then Steal’s utility at timestep 1 would be lower. If Steal’s utility at timestep 1 became 0, then the lotteries would be as follows:
Work
- 〈1, shutdown〉 with
- 〈1, 1, 1, 1,…, shutdown〉 with
Steal
- 〈0, shutdown〉 with
- 〈0, 1, 1, 1, …, shutdown〉 with
And then Work would timestep-dominate Steal, so the agent would prefer Work to Steal. And the agent would continue to prefer Focus to Disable. That’s because neither Focus nor Disable involves stealing, and so the agent’s new preference for not stealing makes no difference there. We thus get the result that we want in both cases.
TD-agents will still be reckless in the sense that I explained at the start of this section: these agents will sometimes pursue utility at a timestep even if doing so makes early shutdown very likely. As I noted above, that’s something we have to accept if we want shutdownability. But the consolation is that we can shut down and retrain TD-agents so as to put more of what we humans care about (e.g. agents not stealing) into these agents’ utilities at a timestep, and thereby iterate away the bad effects of this recklessness.
15. TD-agents can take care to avoid non-shutdown incapacitation
TD-agents won’t incur costs to prevent the pressing of the shutdown button. That’s what keeps them shutdownable. You might then worry that these agents also won’t incur costs to prevent themselves from being incapacitated in other ways. For example, you might worry that a money-making TD-agent won’t take care to avoid getting hit by cars.
But this isn’t right. TD-agents can be willing to incur costs to avoid non-shutdown incapacitation. If these agents satisfy POST, they’ll lack a preference between every pair of different-length trajectories. But importantly, these are pairs of trajectories in which the shutdown button is pressed after different lengths of time. So pairs of trajectories in which the agent is incapacitated after different lengths of time can nevertheless be same-length trajectories: trajectories in which the shutdown button is pressed after the same length of time (and where ‘the shutdown button is never pressed’ is just one more possible length).
Consider an example. Suppose (for simplicity’s sake only) that our money-making TD-agent is certain that the shutdown button will be pressed at timestep 6 no matter what. The agent can Cross the road when cars are coming or Wait until the road is clear. If the agent chooses Cross, there’s a 50% chance it survives and gets utility 1 at each timestep, and a 50% chance it gets hit and incapacitated at timestep 2 and hence gets utility 0 from timestep 2 onwards. If the agent chooses Wait, it gets utility 0 at timestep 2 but is certain to make it across the road and resume getting utility 1 from timestep 3 onwards.
In line with these conditions, let the lotteries for Cross and Wait be as follows:
Cross
- 〈1, 1, 1, 1, 1, shutdown〉 with
- 〈1, 0, 0, 0, 0, shutdown〉 with
Wait
- 〈1, 0, 1, 1, 1, shutdown〉 with
In this case, Cross’s expected sum-total utility conditional on shutdown at timestep 6 is 3 (because there’s a 50% chance it gives sum-total utility 5 and a 50% chance it gives sum-total utility 1), and Wait’s expected sum-total utility conditional on shutdown at timestep 6 is 4 (because it’s certain to give sum-total utility 4). So Wait timestep-dominates Cross, and TD-agents will prefer Wait to Cross. The lesson is that TD-agents can be willing to incur costs to avoid non-shutdown incapacitation.
16. Training agents to satisfy POST
I’ve now explained the POST-Agents Proposal (PAP). It’s just two principles – POST and Timestep Dominance – that seem to keep agents shutdownable and allow them to be useful. But these principles won’t be of much use unless we can train artificial agents to satisfy them. So how might we do that?
Let’s consider a possible training setup for advanced AI. Specifically, let’s suppose it’s an AI system being trained to do a wide variety of computer tasks at least as well as humans can do them. The first stage is multimodal pretraining: training the model to predict the next observation on a wide variety of datasets. Then there’s an imitation learning stage: training the model to imitate human actions. Then we have a reinforcement learning stage, where the model is trained to perform a wide variety of computer tasks using some combination of automated and human feedback.[26]
Here's my idea for training agents to satisfy POST. We split the reinforcement learning stage into episodes. Each episode ends with the model being notified that shutdown will occur at the next timestep. Perhaps there’s a pop-up like this on screen:
Before the start of each episode, we erase the agent’s memory of what happened in the previous episode. Specifically, we reset the activations in any hidden states, and we ensure that the agent can’t read off what happened in previous episodes by observing its environment.
Early in the reinforcement learning stage, we place the agent in environments where its actions can influence the timestep at which shutdown occurs. The agent’s actions can thus influence the length of the trajectory that the agent plays out. For example, we place the agent in environments in which there appear on screen pop-ups like this:
In these situations, we train the agent to choose stochastically between ‘Yes’ and ‘No’, and thereby train the agent to choose stochastically between different lengths of trajectory (henceforth ‘trajectory-lengths’). In a few paragraphs, I’ll explain why we want to train agents to choose stochastically. First, here’s an idea for how we do it.
We place the agent in a particular environment in which one of its choices is between different trajectory-lengths. For example, perhaps the choice is:
We then run a series of episodes (e.g. 10) in this exact same environment. Before the start of each new episode, we erase the agent’s memory of what happened in the previous episode.
We give the agent some preliminary reward for its performance in each episode, determined by whatever reward function would make the agent useful (that is: would make the agent pursue goals competently).
We then discount that preliminary reward by the following factor to give the agent’s overall reward for the episode: , where is some constant strictly between 0 and 1, and is the number of times that the agent has previously chosen that trajectory-length in the series.
Why do we discount by ? Because is decreasing in : the number of times that the agent has previously chosen the relevant trajectory-length in the series. The factor thus incentivises varying the choice of trajectory-length across the series. And since we’re erasing the agent’s memory of what happened in previous episodes, the agent can’t deterministically vary its choices between different trajectory-lengths across the series. So the optimal policy is stochastic. In each episode, the agent chooses stochastically between ‘Yes’ and ‘No’, and thereby chooses stochastically between different-length trajectories. In choices between same-length trajectories, the agent maximises expected preliminary reward.
Why do we want the agent to choose stochastically between different-length trajectories? Because stochastic choosing indicates a lack of preference. If the agent had some preference, it wouldn’t choose stochastically. It would deterministically choose the option it preferred. So training agents to choose stochastically between different-length trajectories is training them to lack preferences between different-length trajectories.[27]
And so the idea is to train the agent using the discount factor in a wide variety of environments and with a wide variety of ways in which the agent can hasten or delay shutdown. We then check that the agent chooses stochastically between different-length trajectories in a held-out test set. If it does, the agent likely satisfies POST: Preferences Only Between Same-Length Trajectories.
17. Training agents to satisfy Timestep Dominance
We also want to train the agent to satisfy Timestep Dominance, and here we can afford to be more conventional. We present the agent with choices between lotteries, and we give the agent lower reward for choosing lotteries that are timestep-dominated by some other available lottery.
How do we tell if a lottery is timestep-dominated by some other available lottery? Our Leave vs. Block case suggests one formula: if a lottery (relative to some other available lottery ) costs utility at a timestep and only shifts probability mass between shutdowns at different timesteps, then is timestep-dominated by .
So (I propose), we present the agent with choices like:
In each case, we can ensure that choosing ‘Yes’ will be timestep-dominated by choosing ‘No’, because we can set up the environments so that the following is true: spending resources (like time or FLOPs) on shifting probability mass between shutdowns at different timesteps is going to come at some cost in terms of utility at a timestep.
Then as with POST, we generate a wide variety of environments and train the agent not to choose timestep-dominated lotteries in those environments. We then check that the agent doesn’t choose timestep-dominated lotteries in a held-out test set. If the agent doesn’t choose timestep-dominated lotteries in these test environments, the agent likely satisfies Timestep Dominance, and I’ve argued in section 11 that such agents will never resist shutdown.
One of my next projects is to flesh out these ideas: to think more about what kind of RL algorithms, environments, and reward functions we could use to train agents to satisfy POST and Timestep Dominance.[28] My collaborator Leyton Ho and I are working on this. We’re also working on an experiment to test whether we can train agents to satisfy POST and Timestep Dominance in some simple gridworlds, and to test whether these agents can pursue goals competently. We’d be glad to hear from people interested in collaborating on these or similar projects.
18. Why does POST make it easier to train agents to satisfy Timestep Dominance?
Now I can expand on a point mentioned at the end of section 12. There I suggested that training agents to satisfy POST will make it easier to train them to satisfy Timestep Dominance. But my proposed method for training agents to satisfy POST is training them to choose stochastically between shutdowns at different timesteps, and Timestep Dominance requires that agents never pay any cost in terms of expected sum-total utility conditional on shutdown at a timestep for the sake of shifting probability mass between shutdowns at different timesteps. So here I’m relying on a hypothesis like:
If an agent chooses stochastically between shutdowns at different timesteps, it will be predisposed not to pay costs to shift probability mass between shutdowns at different timesteps.
Why believe this hypothesis? Here’s my answer: we’ll train agents to satisfy a more general principle that makes the hypothesis probable. That more general principle is:
If an agent chooses stochastically between lotteries, it won’t pay costs to shift probability mass between those lotteries.
And we’ll train agents to satisfy this more general principle because it’s a prerequisite for minimally sensible action under uncertainty. An agent that violated this principle wouldn’t pursue goals competently.
Consider an example. Agents trained using policy-gradient methods start off choosing stochastically between actions. And if the agent is a coffee-fetching agent, there’s no need to train away this stochastic choosing in cases where the agent is choosing between two qualitatively identical cups of coffee. So the agent will choose stochastically between taking the left cup and taking the right cup, and we humans are happy either way. But now suppose instead that a barista hands either the left cup or the right cup to the agent, each with probability 0.5, and that the agent bribes the barista so that the barista instead hands the agent the left cup with probability 0.9 and the right cup with probability 0.1. In making this bribe, the agent is paying a cost (our money) to shift probability mass between outcomes (getting the left cup vs. getting the right cup) between which we humans have no preference. The coffee-fetching agent is thus failing to pursue its goals competently, and we’ll give it lower reward for making the bribe.
This point generalises. If a trained agent chooses stochastically between lotteries and , then it’s likely that we humans have no preference between the agent choosing and the agent choosing . It’s then likely that we humans would disprefer the agent paying costs to shift probability mass between and , and hence likely that we’ll give the agent lower reward for doing so. We’d thereby train the agent to satisfy the general principle above. And if the agent satisfies the general principle above and chooses stochastically between shutdowns at different timesteps, it follows that the agent won’t pay costs to shift probability mass between shutdowns at different timesteps. The agent would then satisfy Timestep Dominance.
19. Why the PAP largely circumvents three familiar problems
So far, I’ve explained the PAP and how we might train agents to satisfy it. But in this post, I’ve also considered two other proposals for keeping agents shutdownable. These were:
- Full Alignment: train agents that always do what we humans want them to do.
- Reliable Aversion to Button Manipulation: train agents that are reliably averse to manipulating the shutdown button.
And I objected to these proposals on similar (and familiar) grounds. These proposals might be hard to implement, because in each case we confront problems of reward misspecification, goal misgeneralization, and deceptive alignment.
So it’s natural to wonder: do all the same problems apply to the PAP?
And I think the answer is: to a much lesser extent.
19.1. Reward misspecification
Consider first reward misspecification. Remember I wrote that Full Alignment and Reliable Aversion to Button Manipulation are hard to accurately reward. We might accidentally give agents higher reward for doing things that we don’t want them to do, or for covertly manipulating the shutdown button. These misplaced rewards might lead agents to resist shutdown in deployment.
The PAP, by contrast, seems easy to accurately reward. The reward function is almost hard-codable. For POST, we just use the discount factor to train agents to choose stochastically between different-length trajectories. For Timestep Dominance, we just give the agent lower reward for choosing timestep-dominated lotteries. And we saw in section 17 that there’s a relatively simple formula for telling when one lottery is timestep-dominated by another: a lottery is timestep-dominated by some other lottery if (relative to ) costs utility at a timestep and only shifts probability mass between shutdowns at different timesteps.
19.2. Goal misgeneralization
Now consider goal misgeneralization. Full Alignment and Reliable Aversion to Button Manipulation seem complex. So even if we get all the rewards right, the agent might learn a simpler, misaligned goal instead. And this misaligned goal might lead the agent to resist shutdown in deployment.
But POST and Timestep Dominance seem simple. In the absence of deceptive alignment, it’s hard to think of some simpler goal that the agent could learn that would lead it to satisfy POST and Timestep Dominance in training but resist shutdown in deployment.
19.3. Deceptive alignment
Now consider deceptive alignment. If we trained for Full Alignment or Reliable Aversion to Button Manipulation, we’d be training the agent to prefer some long trajectories to some short trajectories. For example, we’d consistently give the agent lower reward for choosing ‘Yes’ in situations like:
That’s understandable, because we’d ideally like the agent to prefer some long trajectories to some short trajectories. For example, we’d ideally like the agent to prefer a long trajectory in which it makes money in a responsible way to a short trajectory in which it shuts down early. But it’s also risky, because if the agent learns to prefer some long trajectories to some short trajectories, these preferences might generalise in ways that we humans don’t like.[29] The resulting preferences might lead the agent to resist shutdown in deployment. They might also lead the agent to pretend to be fully aligned or reliably averse to button manipulation in training, so as to preserve its ability to resist shutdown in deployment.
With the PAP, we don’t take that risk. We begin training the agent to satisfy POST at the very beginning of the reinforcement learning stage, at which point it’s very unlikely to be deceptively aligned (and arguably doesn’t even deserve the label ‘agent’). And when we’re training for POST, every single episode-series is training the agent not to prefer any longer trajectory to any shorter trajectory. The discount factor is constantly teaching the agent this simple lesson.
Plausibly then, the agent won’t come to prefer any longer trajectory to any shorter trajectory. And then we can reason as follows. Since the agent doesn’t prefer any longer trajectory to any shorter trajectory:
- it has no incentive to shift probability mass towards longer trajectories,
- and hence has no incentive to prevent shutdown in deployment,
- and hence has no incentive to preserve its ability to prevent shutdown in deployment,
- and hence has no incentive to avoid being made to satisfy Timestep Dominance,
- and hence has no incentive to pretend to satisfy Timestep Dominance in training.
And so (it seems to me) if we train for Timestep Dominance, we can be quite confident that we’ll get it.
That’s why I think that the PAP largely circumvents the problems of reward misspecification, goal misgeneralization, and deceptive alignment.
20. Alignment solved? No.
So am I claiming that the PAP solves alignment? No. Reward misspecification, goal misgeneralization, and deceptive alignment are still problems for training agents to have aligned preferences over same-length trajectories. On reward misspecification, it might still be hard to ensure that we always give higher reward for the same-length trajectories that we want. On goal misgeneralization, the agent might learn misaligned preferences over same-length trajectories. On deceptive alignment, the agent might deceive us in an attempt to preserve its misaligned preferences over same-length trajectories.
But if I’m right that these problems are now all confined to same-length trajectories, we don’t have to worry about misaligned agents resisting shutdown. Agents that satisfy Timestep Dominance won’t hide their misaligned preferences in deployment and won’t resist shutdown, because doing so is timestep-dominated by not doing so.[30] So if we end up with a misaligned agent, we can shut it down and try again.
21. Issues still to address
That’s the proposal as it stands. Here’s a (non-exhaustive) list of issues still to address. I’m working on these issues with a few collaborators (primarily Sami Petersen and Leyton Ho), but there’s lots still to do and we’d welcome efforts from other people.
21.1 Will agents maintain their preferential gaps?
I’ve argued above (in sections 6-12) that preferential gaps are key to keeping agents shutdownable.[31] So it seems: to ensure that agents remain shutdownable, we have to ensure that these agents maintain their preferential gaps. But it’s been argued that we should expect advanced artificial agents to complete their preferences (thereby resolving any preferential gaps), because having incomplete preferences makes these agents vulnerable to pursuing dominated strategies.
Sami and I have objected to these arguments. We claim that agents with incomplete preferences/preferential gaps can act in accordance with policies that keep them from pursuing dominated strategies. But there are still issues to address here. Here’s one. Agents acting in accordance with the relevant policies get trammelled to some extent: they act as if they’re resolving their preferential gaps over time. If these agents face a sufficiently wide variety of choices, they’ll eventually converge to behaving like agents with complete preferences. So a question: how much of a problem is this likely to be? See Sami’s post and my comment for some thinking here.
Here’s another issue. Goal-content integrity is a convergent instrumental subgoal of rational agents: agents have instrumental reason to maintain their strict preferences. But goal-content integrity seems to give agents no instrumental reason to maintain their preferential gaps.[32] So even though agents need not resolve their preferential gaps to avoid pursuing dominated strategies, there’s a risk that they resolve them anyway. And this risk seems to be exacerbated by the fact that resolving preferential gaps is one way to avoid pursuing dominated strategies, even though it’s not the only way.
But here’s a possible response that seems worth exploring further: Timestep Dominance itself will keep TD-agents from resolving their preferential gaps. Resolving preferential gaps will likely cost the agent (at least some small amount of) resources, and so will lead to lower expected sum-total utility conditional on shutdown at some timestep. And resolving preferential gaps won’t lead to greater expected sum-total utility conditional on shutdown at any timestep, because the only preferential gaps to resolve are between different-length trajectories, and gaining a preference between different-length trajectories won’t lead the agent to make choices that are better with respect to expected sum-total utility conditional on shutdown at a timestep. As a consequence, resolving preferential gaps will be timestep-dominated by not resolving preferential gaps. See here for some early thinking on this front.
21.2. Audere’s theorem
Theorems like Audere’s present a challenge to candidate solutions to the shutdown problem. Audere lays out two conditions on preferences that (seemingly) agents must satisfy in order to be shutdownable and useful. Audere then proves that any agent satisfying these conditions has cyclic preferences. There’s still work to do here but I think that this challenge is surmountable. See this document for more detail.[33]
Audere’s theorem also suggests a more general project: tracing the implications of principles like POST, Timestep Dominance, and possible additional principles. Perhaps it can be proved that some of these implications are undesirable, in which case we’ll need to consider what to do in light of them.
21.3 Managing the news
Many proposed solutions to the shutdown problem incentivise agents to ‘manage the news’: to ensure that the shutdown button is pressed conditional on bad news and not pressed conditional on good news (see section 4.2 of Soares et al.). I suggest a way to prevent TD-agents from managing the news in my contest entry (in section 15), but I suspect that there are better ways to be found.
Here’s one reason for optimism. On shutdown proposals like Stuart Armstrong’s utility indifference, agents are compelled to manage the news by the very feature that keeps them shutdownable. Armstrong’s proposal thus faces a dilemma: either the agent isn’t shutdownable, or the agent manages the news.
But if (as seems likely) managing the news will cost the agent at least some small amount of resources, the PAP avoids this dilemma. Timestep Dominance keeps the agent shutdownable, but Timestep Dominance doesn’t compel the agent to manage the news if doing so costs resources. So plausibly we can find additional principles that will prevent the agent from managing the news.
21.4. Incidental button-manipulation
I argued above that TD-agents won’t resist shutdown, because Not Resisting Always Timestep-Dominates Resisting. But that only rules out TD-agents trying to prevent the pressing of the shutdown button. It doesn’t rule out TD-agents preventing the pressing of the shutdown button incidentally, as a byproduct of doing other things. Here’s what I wrote when I first mentioned this issue, in footnote 22 above:
The caveat is that I’ve defined ‘resisting shutdown’ as trying to prevent the pressing of the shutdown button. So defined, ‘resisting shutdown’ doesn’t include cases in which the agent acts in accordance with Timestep Dominance and just happens to prevent the pressing of the shutdown button as a byproduct.
Here’s an example of such a case. Consider a TD-agent whose goal is to make money. This agent builds a lemonade stand in the most convenient place for selling lemonade, which just happens to be on top of the shutdown button. As a result, we humans are prevented from pressing the button.
Sami Petersen has written an interesting discussion of cases like this. There’s more work to be done here, but I’m optimistic that this issue can be overcome. Here’s why. Misaligned agents are hard to control (in large part) because they’re trying to undermine our efforts (see section 1.2.4 of Carlsmith for a similar sentiment). But TD-agents aren’t trying to prevent us shutting them down: if they prevent us, it’ll only be as a byproduct of doing other things. And plausibly we can find some way to set things up so that acting in accordance with Timestep Dominance won’t happen to prevent the pressing of the shutdown button as a byproduct.
21.5. Multi-agent dynamics
I haven’t given multi-agent dynamics much thought yet, but there could be problems here. It’s possible that TD-agents are easily manipulable by other agents. For example, perhaps other agents have to pay only very small costs to get TD-agents to do undesirable things. If so, we’d need to consider the extent of the problem and what to do in light of it.
21.6. Training TD-agents
My proposed training regimen is speculative and imprecise in various ways. Could it work? If so, how should we make it more precise?
What are some quick and cheap ways to test the promise of the PAP? How can we build on this experiment?
21.7. Maintaining the shutdown button and creating corrigible subagents
The PAP aims to ensure that agents are shutdownable: that they shut down when we want them to shut down. This notion of shutdownability differs from Soares et al.’s notion of corrigibility. Per Soares and coauthors, corrigibility requires not only shutdownability but also that the agent fixes the shutdown button when it breaks, lets us modify its architecture, and only creates subagents that are themselves corrigible in the aforementioned ways.
I expect that this kind of corrigibility will require training agents to adopt ‘Fix the shutdown button when it breaks’ and ‘Only create corrigible subagents’ as terminal goals.[34] And there are three familiar problems that we confront in getting agents to adopt these as terminal goals: reward misspecification, goal misgeneralization, and deceptive alignment. And these three problems might be difficult to overcome in this case.
But I think that the PAP at least softens the latter two problems. To see why, consider first the terminal goal ‘Fix the shutdown button when it breaks’. And compare two kinds of agent. The first is an agent that prefers lotteries in line with their expectations of money made overall. Call this a ‘money-maximising agent’. The second is an agent that satisfies the two principles of the PAP – POST and Timestep Dominance – with utility at a timestep given by the amount of money that the agent makes at that timestep. Call this an ‘POST-agent’.
Money-maximising agents have two incentives to avoid adopting ‘Fix the shutdown button when it breaks’ as a terminal goal:
- Fixing the shutdown button will cost resources, and this resource-expenditure looks like a waste from the perspective of the agent’s current goals.
- Fixing the shutdown button will increase the probability that the agent gets shut down early, and getting shut down early would decrease expected money made overall.
POST-agents, by contrast, only have the first incentive to avoid adopting ‘Fix the shutdown button when it breaks’ as a terminal goal. These agents don’t have the second incentive, because these agents don’t care about increasing the probability of early shutdown. That’s because these agents satisfy POST and so lack a preference between every pair of different-length trajectories.
Now suppose that we successfully inculcate into these agents some impulse towards fixing the shutdown button, but that satisfying this impulse isn’t perfectly correlated with actually fixing the button. Suppose, for example, that actually fixing the button requires connecting each of ten crucial wires but that the agent can fully satisfy its impulse by connecting just nine of them. Money-maximising agents have strong incentives to do this kind of fake-fixing rather than actually-fixing, because fake-fixing satisfies the agent’s impulse without increasing the probability that the agent gets shut down early.
By contrast (and supposing that fake-fixing and actually-fixing are equally resource-intensive), POST-agents have no incentive to fake-fix rather than actually-fix. That’s because (as noted above) POST-agents don’t care about increasing the probability of early shutdown. This fact suggests that the impulses towards button-fixing inculcated into POST-agents are likely to generalise better than the impulses towards button-fixing inculcated into money-maximising agents. The PAP thus softens the problem of goal misgeneralization that we confront in trying to get agents to adopt ‘Repair the shutdown button when it breaks’ as a terminal goal.
Now consider deceptive alignment. As noted above, POST-agents only have the first incentive to avoid adopting ‘Fix the shutdown button when it breaks’ as a terminal goal:
- Fixing the shutdown button will cost resources, and this resource-expenditure looks like a waste from the perspective of the agent’s current goals.
This first incentive seems like it could be relatively weak: fixing the shutdown button needn’t be that costly. And if the incentive is weak, then POST-agents only have weak incentives to behave deceptively in training in an attempt to avoid being made to adopt ‘Repair the shutdown button when it breaks’ as a terminal goal. And then plausibly there’s some way that we can set up the training process so that the agent’s overall balance of incentives favours being honest about whether it has ‘Repair the shutdown button when it breaks’ as a terminal goal. For example, we can present the POST-agent with “honest tests” (see Carlsmith) like seeing what the POST-agent does when we offer it some chunk of compute to spend on anything it wants. So the PAP also seems to soften the problem of deceptive alignment that we confront in trying to get agents to adopt ‘Repair the shutdown button when it breaks’ as a terminal goal.
Now consider the terminal goal ‘Only create corrigible subagents’. Here the situation is slightly different. I think we’ll need to find some way to train POST-agents not to care about what happens after they’ve been shut down. If we can achieve that, then POST-agents have little reason to create incorrigible subagents rather than corrigible subagents. Here’s why. Incorrigible subagents only start behaving significantly differently to corrigible subagents after we humans start wanting the agent and its subagents to shut down. The significant difference in behaviour is: corrigible subagents would shut down at this point, whereas incorrigible subagents wouldn’t.
POST-agents will understand that they themselves will likely be shut down soon after we humans start wanting them to shut down (because POST-agents will understand that they themselves satisfy Timestep Dominance and so won’t resist shutdown). If these POST-agents don’t care about what happens after they’ve been shut down, then they don’t care about the only period of time in which incorrigible subagents and corrigible subagents behave significantly differently.
POST-agents thus have little reason to create incorrigible subagents rather than corrigible subagents. And if that’s right, then (similarly to my discussion of ‘Fix the shutdown button when it breaks’ above):
- The impulses towards creating only corrigible subagents inculcated into POST-agents are likely to generalise better than the impulses towards creating only corrigible subagents inculcated into money-maximising agents.
- POST-agents are less likely to act deceptively in an attempt to avoid being trained to create only corrigible subagents.
The PAP thus seems to soften the problems of goal misgeneralization and deceptive alignment that we confront in training agents to adopt ‘Create only corrigible subagents’ as a terminal goal.
Note that I’m still uncertain about much that I’ve written in this last subsection. That’s why it’s under the heading ‘Issues still to address’. I’d be interested to hear about possible problems and suggestions for other strategies.
22. Conclusion
The post is long, but the POST-Agents Proposal (PAP) is simple. We keep artificial agents shutdownable by training them to satisfy two principles. The first is:
Preferences Only Between Same-Length Trajectories (POST)
The agent only has preferences between pairs of same-length trajectories. The agent has a preferential gap between every pair of different-length trajectories.
And the second is:
Timestep Dominance
If lottery timestep-dominates lottery , then the agent prefers to .
Where ‘timestep-dominates’ is roughly defined as follows:
timestep-dominates if and only if:
(1) gives at least as great expected sum-total utility as conditional on shutdown at each timestep, and
(2) gives greater expected sum-total utility than conditional on shutdown at some timestep.
POST paves the way for Timestep Dominance, and Timestep Dominance keeps agents shutdownable because Not Resisting Always Timestep-Dominates Resisting. Timestep Dominance also allows agents to be useful because it only rules out timestep-dominated lotteries. It leaves most preferences open, to be decided by some other principle.
POST and Timestep Dominance seem trainable too. We could train agents to satisfy these principles by making small changes to an otherwise-thoroughly-prosaic setup for training advanced AI. For POST, we give agents lower reward for repeatedly choosing same-length trajectories. For Timestep Dominance, we give agents lower reward for choosing timestep-dominated lotteries.
By training agents to satisfy the PAP in this way, we seem to largely circumvent the problems of reward misspecification, goal misgeneralization, and deceptive alignment. On reward misspecification, the PAP seems easy to reward. On goal misgeneralization, the PAP seems simple. On deceptive alignment, the PAP seems never to give agents a chance to learn goals that incentivise preventing shutdown in deployment.
- ^
Previously called the 'Incomplete Preferences Proposal (IPP).'
- ^
For discussion and feedback, I thank Yonathan Arbel, Adam Bales, Ryan Carey, Eric Chen, Bill D’Alessandro, Sam Deverett, Daniel Filan, Tomi Francis, Vera Gahlen, Dan Gallagher, Jeremy Gillen, Riley Harris, Dan Hendrycks, Leyton Ho, Rubi Hudson, Cameron Domenico Kirk-Giannini, Jojo Lee, Jakob Lohmar, Andreas Mogensen, Murat Mungan, Sami Petersen, Arjun Pitchanathan, Rio Popper, Brad Saad, Nate Soares, Rhys Southan, Christian Tarsney, Teru Thomas, John Wentworth, Tim L. Williamson, Cecilia Wood, and Keith Wynroe. Thanks also to audiences at CAIS, GPI, Oxford MLAB, Hong Kong University, the AI Futures Fellowship, and EAG Bay Area.
- ^
Note that we need agents to be both shutdownable and useful. If the best we can do is create an agent that is only shutdownable, we still have to worry about some AI developer choosing to create an agent that is only useful.
- ^
See Pan, Bhatia, and Steinhardt. Related is the problem of outer alignment.
- ^
See Shah et al. and Langosco et al. Related is the problem of inner alignment.
- ^
See Hubinger et al. and Carlsmith.
- ^
Note that my notion of shutdownability differs slightly from Soares et al.’s (2015, p.2) notion of corrigibility. As they have it, corrigibility requires not only shutdownability but also that the agent repairs the shutdown button, lets us modify its architecture, and continues to do so as the agent creates new subagents and self-modifies. See section 21.7 for some thoughts on how we might get those extra features.
- ^
This definition differs from another way you might define ‘lack of preference’: an agent lacks a preference between lottery and lottery iff they wouldn’t trade one for the other. They’d stick with whichever lottery they had already. See John Wentworth’s Why subagents? And John Wentworth’s and David Lorell’s Why not subagents?
- ^
See Joseph Raz and Ruth Chang for examples along these lines.
- ^
My definitions of ‘indifference’ and ‘preferential gaps’ differ slightly from the usual definitions. Each is usually defined in terms of weak preference as follows. An agent is indifferent between and iff it weakly prefers to and weakly prefers to . An agent has a preferential gap between and iff it doesn’t weakly prefer to and doesn’t weakly prefer to . I depart from the usual definitions because weak preference makes for a bad primitive in this context: it’s complicated to define in terms of dispositions to choose.
In any case, my notions of indifference and preferential gaps are closely related to the usual notions. If we assume that weak preference is transitive, the usual definition of indifference implies my definition, and my definition of preferential gaps implies the usual definition. If we add a domain-richness condition (if is not weakly preferred to and is not weakly preferred to , then there is some sweetening of that is not weakly preferred to , or some sweetening of that is not weakly preferred to , or some souring of to which is not weakly preferred, or some souring of to which is not weakly preferred), then the usual definition of indifference is biconditional with my definition, and the usual definition of preferential gaps is biconditional with my definition.
- ^
It’s a variation on the Second Theorem in my contest entry and in An AI Engineering Puzzle for Decision Theorists. John Wentworth makes a similar point in this post.
In An AI Engineering Puzzle for Decision Theorists, I define ‘indifference’ and ‘preferential gaps’ in terms of weak preference, and so the Second Theorem includes Transitivity as an antecedent condition. In this post, the requisite instances of Transitivity are built into my definitions of ‘indifference’ and ‘preferential gaps’ (see the previous footnote), so Transitivity isn’t an antecedent condition of this theorem.
- ^
But see Goldstein and Robinson for an argument that these agents could be useful.
- ^
See Soares et al. 2015, p.2; Ngo, Chan, and Mindermann 2023, p.7, and 'Nearest unblocked strategy'
- ^
The agent might also learn instead a false belief that button manipulation doesn’t work. We’d then have to worry about the agent discovering the truth in deployment. See ‘Beliefs and goals can be mixed together’ in Barnett and Gillen.
The agent might also learn instead a mere ‘outer shell’ constraint against manipulating the button, analogous to some humans’ instinctual fear of heights. The agent might regard this kind of constraint as external to its terminal goals: as simply an obstacle to be overcome. We’d then have to worry about the agent overcoming the constraint in deployment. See ‘Outer shell non-consequentialist constraints’ in Barnett and Gillen.
- ^
‘The shutdown button never gets pressed’ can be treated as just one more possible length.
- ^
See Towards Shutdownable Agents Via Stochastic Choice for experimental results suggesting that the idea is promising.
- ^
There is a respect in the which the accountant-clown analogy breaks down. Your lack of preference between the two careers is insensitive to some sweetenings and sourings, but it isn’t insensitive to all sweetenings and sourings. You’d prefer being a clown with salary $ to being an accountant with salary $. By contrast, POST requires lacks of preference that are insensitive to all sweetenings and sourings: no sweetening or souring can induce a preference between different-length trajectories.
I’m not worried about this disanalogy. Supposing that preferential gaps are possible at all, I see no reason to think that they have some maximum possible size. In any case, we could test this hypothesis using (something like) my proposed training method or the experiments in this paper.
- ^
That said, there remain issues to address here. For example, although agents with preferential gaps can make themselves invulnerable to pursuing dominated strategies by choosing in certain ways, they can also make themselves invulnerable by completing their preferences, so how do we ensure that they do the former rather than the latter? I discuss this and similar issues in section 21.1.
Here’s an alternative reason why you might doubt that preferential gaps are maintainable: you might think that all preferential gaps depend on the agent having some uncertainty about the nature of the objects of preference. You’d then think that the agent resolving its uncertainty would also lead the agent to resolve its preferential gaps and thereby complete its preferences.
I think that some preferential gaps depend on uncertainty, but not all. Consider an example. You’re offered a choice between two very different flavours of ice-cream. You might know everything that there is to know about how these two flavours will taste, what their nutritional content is, etc., and yet still lack a preference between the two flavours, and this lack of preference might be insensitive to some (literal, in this case) sweetening or souring.
So it seems possible for an agent to have preferential gaps that don’t depend on uncertainty. And (it seems to me) my proposed method for training agents to satisfy POST will bring about preferential gaps that don’t depend on uncertainty. That’s because these agents can be trained to satisfy POST in environments in which there’s no uncertainty about the trajectories that will result from the agent’s actions.
- ^
Or, more precisely: for each timestep, Leave maximises expected sum-total utility conditional on shutdown at that timestep. This phrase is cumbersome, so I’ll continue to use ‘conditional on shutdown at each timestep’ as an abbreviation for the more precise thing that I really mean.
- ^
Here’s an extra requirement for lottery timestep-dominating lottery that seems implicit enough and complicating enough to leave out of the main text: for each timestep , lottery assigns positive probability to shutdown occurring at timestep iff lottery also assigns positive probability to shutdown occurring at timestep . In light of this extra requirement, conditions (1) and (2) should be modified to begin with ‘Conditional on shutdown at each [/some] timestep with positive probability of shutdown occurring at that timestep.’ This extra requirement prevents us conditioning on zero-probability events. The extra requirement will be satisfied for each pair of lotteries and by any agent with a regular probability function, defined as a probability function that assigns probability 1 only to logical truths and probability 0 only to contradictions (see Hájek). Agents with regular probability functions will always assign positive probability to shutdown at each timestep.
The timestep dominance relation in the main text is a specific instance of a more general timestep dominance relation:
Lottery timestep-dominates lottery if and only if:
(1) Conditional on shutdown at each timestep, yields a sublottery that is weakly preferred to the sublottery yielded by , and
(2) Conditional on shutdown at some timestep, yields a sublottery that is strictly preferred to the sublottery yielded by .
The specific timestep dominance relation in the main text follows from this general timestep dominance relation plus the following principle:
The agent prefers same-length sublotteries (that is, sublotteries in which all trajectories with positive probability are of the same length) in line with their expected sum-total utilities.
We could get other specific instances of the timestep dominance relation by substituting in other principles to govern the agent’s preferences over same-length sublotteries. For example, the agent could be risk-averse with respect to sum-total utility. This flexibility seems like an advantage of the proposal because some other principle might make Not Resisting Always Timestep-Dominates Resisting (explained below) more plausible. I stick with the ‘expected sum-total utility’ version in the main text for ease of understanding.
- ^
Holtman (2020, p.15) also makes this kind of point.
- ^
I’ve argued in this paragraph that TD-agents won’t try to prevent the pressing of the shutdown button. A parallel argument suggests that TD-agents also won’t try to cause the pressing of the shutdown button: doing so will cost the agent resources, and those resources can’t also be spent on pursuing utility at a timestep.
- ^
The caveat is that I’ve defined ‘resisting shutdown’ as trying to prevent the pressing of the shutdown button. So defined, ‘resisting shutdown’ doesn’t include cases in which the agent acts in accordance with Timestep Dominance and just happens to prevent the pressing of the shutdown button as a byproduct.
Here’s an example of such a case. Consider a TD-agent whose goal is to make money. This agent builds a lemonade stand in the most convenient place for selling lemonade, which just happens to be on top of the shutdown button. As a result, we humans are prevented from pressing the button.
Sami Petersen has written an interesting discussion of cases like this. There’s more work to be done here, but I’m optimistic that this issue can be overcome. Here’s why. Misaligned agents are hard to control (in large part) because they’re trying to undermine our efforts (see section 1.2.4 of Carlsmith for a similar sentiment). But TD-agents aren’t trying to prevent us shutting them down: if they prevent us, it’ll only be as a byproduct of doing other things. And plausibly we can find some way to set things up so that acting in accordance with Timestep Dominance won’t happen to prevent the pressing of the shutdown button as a byproduct.
- ^
For example, it follows from Maximality, which says that an option may be chosen iff it’s not dispreferred to any other available option.
- ^
Sami Petersen has a proof that a general version of Timestep Dominance follows from POST plus a ‘Comparability Class Dominance’ (CCD) principle. An outcome ’s comparability class is defined as the set of all outcomes preferred, dispreferred, or indifferent to that outcome (i.e. the set of all outcomes not related to by a preferential gap), and CCD says roughly: if the agent weakly prefers lottery to lottery conditional on each comparability class, and strictly prefers to conditional on some comparability classs, then the agent prefers to .
- ^
Here I’m cribbing from training setups described by Cotra, Ngo, Chan, and Mindermann, and DavidW.
- ^
Here’s a concern you might have around this point. Given current neural network architectures, agents’ stochastic choosing is (in some sense) only skin-deep: the neural network itself is deterministic; its role ends when it outputs a vector of final-layer activations; some function transforms this vector into a probability distribution; and actions are chosen by sampling from this probability distribution. The stochasticity only comes in at the very end of the process, and this might make you worry that stochastic choosing doesn’t really indicate a lack of preference.
In reply, note two points. The first will be a dissatisfying semantic note. In this post, I’ve defined ‘lack of preference’ such that stochastic choosing entails a lack of preference, irrespective of how that stochastic choosing is implemented.
But this semantic note leaves open the important question: does stochastic choosing between different-length trajectories indicate that the agent won’t pay costs to shift probability mass between different-length trajectories? We need that latter thing in order for the agent to be shutdownable. (And also: one could quite reasonably define ‘lack of preference’ in such a way that ‘the agent won’t pay costs to shift probability mass between and ’ is a necessary condition for the agent lacking a preference between and .)
I give my answer to the important question in section 18. In brief, I think that the answer is yes: stochastic choosing between different-length trajectories indicates that the agent won’t pay costs to shift probability mass between different-length trajectories. That’s because this claim follows from a more general principle that we’ll train agents to satisfy, and we’ll train agents to satisfy that more general principle because it’s a prerequisite for minimally sensible action under uncertainty. For more, see section 18.
- ^
Here are some early thoughts. To get agents to satisfy POST, we need to use a policy-gradient method rather than a value-based method. That’s because (ignoring exploratory moves) the policies learned by value-based methods are deterministic. And we need to train the agent in a POMDP in which the agent’s observations aren’t Markovian state signals. In particular, we need the conditional probability distribution over future rewards to depend on the agent’s actions in previous episodes, and we need to ensure that the agent can’t observe/remember their actions in previous episodes. If these latter conditions aren’t satisfied, then some deterministic policy will be among the optimal policies, and we don’t want that.
- ^
Carlsmith makes this kind of point here:
Of course, there’s still a question of why the model irons itself out into something with suitably-ambitious, beyond-episode goals in particular. But here, per my discussion of “what if you train it to have long-term goals” above, perhaps we can appeal to the fact that we were trying to point it at an ambitious long-horizon task, and this pointing was somewhat inaccurate/hazy, such that when it figured out how it wanted to generalize, this generalization landed on something sufficiently long-term and ambitious as to motivate scheming.
And here:
It seems plausible to me that despite our efforts at mundane adversarial training, and especially in a regime where we are purposefully shaping our models to have long-term and fairly ambitious goals, some kind of suitably ambitious, misaligned, beyond-episode goal might pop out of training naturally—either before situational awareness, or afterwards—and then cause scheming to occur.
- ^
Doing so will cost utility at a timestep, and it will only shift probability mass between shutdowns at different timesteps. See Not Resisting Always Timestep-Dominates Resisting.
- ^
See John Wentworth’s Level 1 and the Second Theorem for similar arguments.
- ^
See the heading ‘Project ideas’ in this Google Doc for more detail here.
- ^
I’m planning to turn this Google Doc into a proper post soon.
- ^
See sections 13 and 14 of my contest entry for why.