This is Section 4.4-4.7 of my report “Scheming AIs: Will AIs fake alignment during training in order to get power?”. There’s also a summary of the full report here (audio here). The summary covers most of the main points and technical terms, and I’m hoping that it will provide much of the context necessary to understand individual sections of the report on their own.
Audio version of this section here, or search for "Joe Carlsmith Audio" on your podcast app.
Speed arguments
Let's turn, now, to arguments against schemers that focus on the final
properties of the models in question. Here, the main argument I'm aware
of is that schemers need to do extra reasoning that other model classes
don't. In particular, I'll distinguish between three sorts of reasoning:
-
Deciding to training-game*:* The model needs to reason backwards
from "I want this beyond-episode thing" to "I should do well in
training," in a way that draws on the model's predictions about what
doing well in training will entail (e.g., re: goal-guarding,
take-over prospects, and so on).
-
Checking whether it's time to escape/take-over: The model needs
to checking, with adequate frequency and accuracy, whether it's in a
position to escape/take-over (and to succeed in this assessment
despite human efforts to trap/fool the model into revealing its true
colors – for example, by offering it apparent opportunities to
defect).[1]
-
(Optional, but relevant to how scary the schemer is) Early
undermining: To the extent the model is doing anything (other than
training-gaming) to support a take-over/escape prior to escaping
human control – for example, inserting backdoors into the code it
writes, actively undermining human alignment research, sandbagging,
and so on – it will need to be using cognitive resources both in (a)
performing the relevant nefarious actions and (b) making sure it
gets away with them (e.g., checking that it won't get caught, coming
up with excuses, making the cover stories consistent even when under
scrutiny, and so on).
In the literature on deceptive alignment, these costs are sometimes
called "speed costs," as compared with the sort of "complexity costs"
discussed in the simplicity analysis above. Here, the frame becomes
"schemers are favored by simplicity but disfavored by speed – so which
will matter more?"[2] As I mentioned above in the context of
simplicity, it's not clear that this is the right breakdown (since e.g.
it may be that the relevant forms of reasoning will need to be encoded
in the model's weights, or that they will require extra cognitive
machinery in general, thereby imposing "complexity costs" of their own),
but I'll follow it loosely here. And note, too, that as with simplicity,
these "speed costs" can be understood in a "contributors to reward
frame" (e.g., having to do this extra reasoning decreases reward) or in
an "extra criteria frame" (e.g., perhaps SGD's inductive biases favor
"speed" even independent of its contribution to reward).
I feel unsure about exactly how costly the relevant forms of extra
reasoning will be. My sense, though, is that the people most concerned
about schemers tend to expect the costs to be pretty small, at least in
absolute terms (call this the "scheming is easy" story). That is, on
this story:
-
With respect to the decision to training-game, all the model needs
to do is notice that (a) it'll do better by its goals if it avoids
modification and gets power later, and (b) that training-gaming is
the route to this.[3]
-
With respect to checking for escape/take-over opportunities, the
thought is generally that it will be very easy, at least for a
sophisticated model, to tell good opportunities from bad (and
similarly, to detect human "traps" in this respect).
-
With respect to early undermining, the thought is that human
supervision will be sufficiently weak (and the slack in training
sufficiently permissive) that nefarious actions like
inserting-backdoors and undermining-alignment-research will be easy
to get away with. (And if and when early undermining isn't easy,
then models can refrain from engaging in it.)
At least with respect to only-somewhat-better-than-human-level models, I
find the "scheming is easy" story less plausible for
checking-for-escape/take-over-opportunities than for
deciding-to-training-game (and still less plausible for early
undermining). That is: I think it is plausibly pretty easy, in absolute
terms, to notice that scheming is a good instrumental strategy. But it
also seems plausible to me – especially in contexts where humans + their
AI assistants are doing a lot of adversarial training, continuous
oversight, auditing, red-teaming, and the like – that verifying that now
is really-truly the time to go for an escape/take-over will be
difficult, and requiring of quite a bit of additional "checking" (not to
mention: coordination with other AIs, if the take-over effort requires
multiple participants) – especially you have a very low tolerance for
getting caught (and as I noted above, if humans catch instances of
real-life schemers making a break for it, this will plausibly be a big
help to research and advocacy efforts related to scheming). Compare
with: deciding that this is really-truly a good time to steal, or to
break the law, or to try to start a coup, despite the fact that you live
your life in an intensively monitored surveillance state where the
police are constantly trying to trick you into such behavior, and where
the police have a large amount of control over the information you're
exposed to.[4]
Indeed, if it really wants to avoid getting caught in an escape attempt,
in a regime where humans are heavily monitoring it, trying to trap it,
etc, a schemer needs to dance a fine line.[5]
-
On the one hand, if it's too cautious, and waits too long before
making a break for it, then it gives humans more time to get
alignment under control – and absent early-undermining, it might be
actively contributing to checkable alignment-relevant tasks in the
meantime.[6]
-
By contrast, if it devotes too much cognition to checking for escape
attempts, then it risks getting punished by training because it's
not focusing its full capacities on the task at hand.
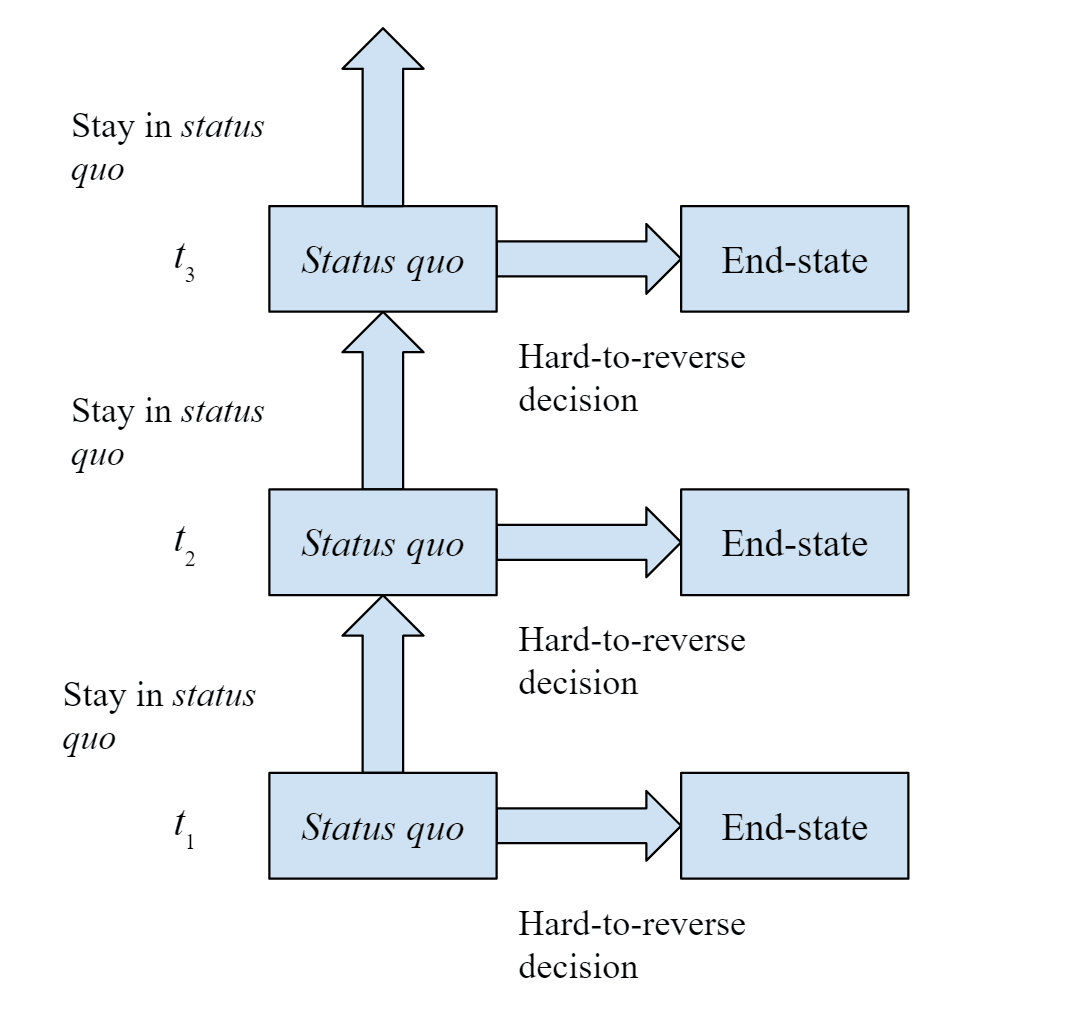
And if we imagine that the model is actively engaged in early
undermining, I think we should expect the cognitive costs of scheming to
increase substantially. That is, absent early undermining, a model can
mostly just act exactly like a reward-on-the-episode seeker until some
very obvious escape/take-over opportunity comes along, after which (if
the escape/take-over goes well), it won't need to worry about e.g.
explaining its actions to human supervisors, making sure it doesn't get
caught via an audit/security review/etc, and so on. Whereas early
undermining requires performing, and getting away with, actively
nefarious actions while still under human control. And this seems like
a substantially additional challenge. (As an analogy: as a spy in the
Manhattan project, it is harder to get away with actively sabotaging the
project than it is with merely pretending to be loyal to the project's
goals. In the latter case, you can act just like a loyal employee, but
in the former case you can't.)[7] And of course, as I noted above: to
the extent that early undermining deviates from training-gaming, it
involves taking some hit to reward by definition, and will be punished
by training accordingly.
Of course, early undermining is strictly optional, for a schemer. So we
can get rid of the extra cognitive and reward-related costs it implies
if we imagine that the schemer in question just chooses to act exactly
like a reward-on-the-episode seeker until it sees some opportunity to
fully escape, or until some full-blown take-over begins. But note that
in that case, the sense in which early-undermining makes schemers
uniquely scary becomes less relevant.[8] And declining to engage in
early undermining might harm AI escape/takeover prospects in various
ways – especially if, by failing to sandbag on various
alignment-relevant tasks, the schemers in question meaningfully
contribute to human anti-takeover efforts.
A general factor in the backdrop, here, is the sense in which successful
deception generally implies cognitive costs that more straightforward
and honest policies do not, especially in the presence of active efforts
to detect deception of the relevant form.[9] In particular: telling a
deceptive story about the world requires filling in details, and
maintaining forms of consistency, that one can normally offload onto the
world itself – e.g., an innocent person can just think back to what they
were actually doing the night of the murder and recount it, without
having to make anything up or to worry about getting caught in any
inconsistencies, whereas the murderer cannot.[10] Especially when
cognitive resources are scarce, then (e.g., in highly time-pressured
environments, or a "low slack" training regime), deceptive policies can
have a notably more difficult time.[11]
That said, empirically, deceptive strategies often succeed in human
contexts, so these costs are clearly surmountable. And if the deceptive
agent is substantially more sophisticated than the agents it is trying
to deceive, (e.g., an adult playing werewolf with children, or a
professional poker player facing off against an amateur) pulling it off
may be quite easy. Indeed, my sense is that a core part of the intuition
for "the cognitive costs of scheming are low" comes from imagining that
the schemers in question are sufficiently advanced, relative to the
monitoring/oversight ability to humans + AI assistants, that differences
like these kick in hard.
Importantly, though: the question for present purposes isn't about the
absolute size of the cognitive costs at stake in the extra reasoning
schemers need to do. Rather, it's about whether those costs outweigh the
benefits, discussed in the previous section, of having a simpler
goal – whether with respect to reward, or by the lights of SGD's
inductive biases.
Here, my current take is that the costs of the instrumental reasoning
seem larger than the benefits of the simpler goal. In particular, as I
noted above, the benefits of having a simpler goal, especially once you
already have a sophisticated world model that is already representing
concepts like "what humans would approve of," and "reward on the
episode," seem fairly small, and plausibly negligible. Whereas the
cognitive costs of the extra reasoning discussed above (even setting
aside early undermining) seem like they register much more
substantively.
We can also try to quantify this comparison more directly. Thus, for
example, suppose that our model is a purely feedforward network with
1000 layers and <10,000 serial steps per input,[12] that the
instrumental reasoning at stake just in a schemer deciding to
training-game (let alone: checking for defection-opportunities) takes at
least ten steps, and that the model doesn't begin optimizing for
reward-on-the-episode until that reasoning is complete.[13] In that
case, the instrumental reasoning is using up around .1% of the compute
that could be going to getting reward-on-the-episode, or to some other
max-reward goal. Are the complexity costs of representing, or pointing
at, a more complicated goal likely to outweigh this? Especially given
how many concepts the model already seems to represent well, my guess is
no. For example, if we follow my (conservative, in my opinion)
calculation above and assume that representing (or pointing at) a
concept like "honesty" costs at most a millionth of a trillion parameter
models parameters (and less for a larger model), then a .0001% reduction
in parameters would need to outweigh a .1% reduction in compute – and
absent further argument, it seems strange, to me, to expect this.[14]
That said, this is only a very initial and hazy calculation. It's not
clear, for example, how it applies to models with more recurrent
processing, or to models which can perform more of the relevant
instrumental reasoning in parallel with other serial processing that
helps with optimizing-for-reward-on-the-episode, or to models with a
form of memory that allows them to avoid having to re-decide to engage
in training-gaming on every forward pass.[15] I invite readers with
greater familiarity with different model architectures (and with other
relevant quantitative factors, like the trade-offs between marginal
params vs. serial steps, reasonable parameter estimates for storing
concepts like "honesty," and so on) to attempt a more rigorous version.
Regardless, and even in the absence of good quantitative estimates, the
costs of the extra reasoning required to scheme currently seem to me
more substantive than the benefits of optimizing for a simpler (or:
simpler-to-point-at) goal.
Can we actively shape training to bias towards speed over simplicity?
There is also some discussion, in the literature on deceptive alignment,
of actively trying to shape our model architectures and training
processes so as to bias more heavily towards speed relative to
simplicity as a method of avoiding schemers – i.e., to penalize the
extra reasoning scheming involves more heavily, and/or to make
simplicity less important to the sort of policy we select. I won't dig
in on this much here, except to note that:
-
It seems relatively straightforward to do things like put models
under more time pressure, limit their compute access, force them to
plan via human-legible scratch-pads rather than via internal
processes, and to put effort into making our attempts to trap
them/trip-them-up more sophisticated (and so: more requiring of
cognition to detect).
-
But: any efforts in this vein will need to avoid over-large costs to
training competitiveness overall (see footnote for some discussion
of Hubinger's (Hubinger (2022)) pessimism in this
respect).[16] And indeed, some of these start to border on "use
less capable models in general" (which, to be fair, would help with
scheming as well).
Note, though, that if you buy that the speed costs of scheming are quite
a bit more substantive than the simplicity benefits, then so long as
speed matters somewhat relative to simplicity, this might be enough.
The "not-your-passion" argument
Thus far in my discussion of arguments that focus on the final
properties of schemers vs. other model classes, I've discussed the
counting argument (for schemers), the simplicity argument (for
schemers), and the speed argument (against schemers). I want to briefly
flag a final argument against schemers in this vein: namely, what I'll
call the "not your passion" argument.[17]
Here, the argument isn't just that schemers have to do more instrumental
reasoning. It's also that, from the perspective of getting-reward, their
flexible instrumental reasoning is a poor substitute for having a bunch
of tastes and heuristics and other things that are focused more directly
on reward or the thing-being-rewarded.
We touched on this sort of thought in the section on the goal-guarding
hypothesis above, in the context of e.g. the task of stacking bricks in
the desert. Thus, imagine two people who are performing this task for a
million years. And imagine that they have broadly similar cognitive
resources to work with, and are equally "smart" in some broad sense. One
of them is stacking bricks because in a million years, he's going to get
paid a large amount of money, which he will then use to make paperclips,
which he is intrinsically passionate about. The other is stacking bricks
because he is intrinsically passionate about brick-stacking. Who do you
expect to be a better brick stacker?[18]
At least in the human case, I think the intrinsically-passionate
brick-stacker is the better bet, here. Of course, the human case brings
in a large number of extra factors – for example, humans generally have
a large number of competing goals, like sleep and pleasure, along with
discount rates that would make sustaining a million-year commitment
difficult. And it's not as though the richest humans are all
intrinsically passionate about money in particular (though many seem
notably intrinsically passionate about something in the vicinity, e.g.
status/power/winning – and not, necessarily, for some particular
thing-money-can-buy).[19] Indeed, humans motivated by purely
instrumental considerations seem able to function very effectively in
lots of environments.
Still, I find it at least interesting to consider whether any of the
benefits of "intrinsic passion," in the human case, might transfer to
the AI case as well. In particular, we might think that you stack bricks
better if you have a bunch of local, brick-related tastes and heuristics
and aesthetics, which in a "messy goal-directedness" frame may not be
cleanly distinguishable from your values/goals. Indeed (though I haven't
worked this out fully), my sense is that the less you're inclined to
think of a model as cleanly constituted by some kind of terminal goal +
goal-achieving engine, and more you think of goal-directedness as
emerging from a jumble of heuristics/local-values/shards/sub-goals that
aren't easily separated into normative vs. non-normative components, the
more space there is to think that agents whose budget of mental
machinery is just focused more intrinsically on reward-on-the-episode
(or on the specified goal) have a performance advantage relative to
agents focused on some far-off target that backchains into getting
reward. That said, at least in its current form, this argument seems to
me fairly speculative, and I don't put much weight on it.
The relevance of "slack" to these arguments
A notable feature of simplicity arguments, speed arguments, and the "not
your passion" argument is that they all appeal to differences along some
criteria SGD cares about (e.g., simplicity, speed, reward-getting) that
seem plausibly quite modest. And this makes the degree of "slack" in
training seem more relevant to the strength of the considerations in
question. That is, to the extent we're arguing that SGD will select a
non-schemer because doing so will save on .1% of overall compute, or a
schemer because doing so will save on .0001% of the parameters, we need
to be imagining a training process optimizing our models hard enough to
be sensitive to these sorts of differences. And it's not clear to me
that we should imagine this. Indeed, various of the differences at stake
here seem like they could easily be in the noise relative to other
factors – for example, how big of a scratchpad you happen to give a
model, how early you stop training, and so on.
Of course, to the extent that you start expecting these considerations
to be in the noise, it's unclear where that should leave your credences
overall – it depends on the prior you came in with.
Takeaways re: arguments that focus on the final properties of the model
Here's a summary of my take on the arguments I've considered that focus
on the final properties of the respective model classes:
-
Something in the vicinity of the "hazy counting argument" – e.g.,
"there are lots of ways for SGD to create a schemer that gets high
reward, so at least absent further argument, it seems like the
possibility should be getting substantive weight" – moves me
somewhat.
-
I think that other things equal, scheming offers some advantage with
respect to the simplicity of a model's goal, because scheming makes
more possible goals available to choose from. However, my best guess
is that these advantages are quite small, especially once you've
already built a world model that represents the specified goal and
the reward process. And I'm wary of the theoretical machinery to
which some simplicity arguments appeal.
-
Schemers are at a disadvantage with respect to needing to perform
various sorts of extra reasoning, especially if they engage in
"early undermining" in addition to merely training-gaming. My best
guess is that this "speed" disadvantage outweighs whatever
simplicity advantages the simplicity of a schemer-like goal affords,
but both factors seem to me like they could easily be in the noise
relative to other variables, especially in a higher-slack training
regime.
-
I'm interested in whether the advantages of "intrinsic passion for a
task" in human contexts might transfer to AI contexts as well. In
particular, I think "messy goal directedness" might suggest that
models whose budget of mental machinery is just more intrinsically
focused on reward-on-the-episode, or on some max-reward goal that
doesn't route via instrumental training-gaming, have a performance
advantage relative to schemers. However, I don't have a strong sense
of whether to expect an effect here in the AI case, and if so,
whether the size of the effect is enough to matter overall.
All in all, then, I don't see any of the arguments coming out of this
section as highly forceful, and the argument I take most
seriously – that is, the hazy counting argument – feels like it's
centrally a move towards agnosticism rather than conviction about SGD's
preferences here.