This is Section 3 of my report “Scheming AIs: Will AIs fake alignment during training in order to get power?”. There’s also a summary of the full report here (audio here). The summary covers most of the main points and technical terms, and I’m hoping that it will provide much of the context necessary to understand individual sections of the report on their own.
Audio version of this section here, or search for "Joe Carlsmith Audio" on your podcast app.
Arguments for/against scheming that focus on the path that SGD takes
In this section, I'll discuss arguments for/against scheming that focus
more directly on the path that SGD takes in selecting the final output
of training.
Importantly, it's possible that these arguments aren't relevant. In
particular: if SGD would actively favors or disfavor schemers, in some
kind "direct comparison" between model classes, and SGD will "find a
way" to select the sort of model it favors in this sense (for example,
because sufficiently high-dimensional spaces make such a "way"
available),[1] then enough training will just lead you to whatever
model SGD most favors, and the "path" in question won't really matter.
In the section on comparisons between the final properties of the
different models, I'll discuss some reasons we might expect this sort of
favoritism from SGD. In particular: schemers are "simpler" because they
can have simpler goals, but they're "slower" because they need to engage
in various forms of extra instrumental reasoning – e.g., in deciding to
scheme, checking whether now is a good time to defect, potentially
engaging in and covering up efforts at "early undermining," etc (though
note that the need to perform extra instrumental reasoning, here, can
manifest as additional complexity in the algorithm implemented by a
schemer's weights, and hence as a "simplicity cost", rather than as a
need to "run that algorithm for a longer time").[2] I'll say much
more about this below.
Here, though, I want to note that if SGD cares enough about properties
like simplicity and speed, it could be that SGD will typically build a
model with long-term power-seeking goals first, but then even if this
model tries a schemer-like strategy (it wouldn't necessarily do this, in
this scenario, due to foreknowledge of its failure), it will get
relentlessly ground down into a reward-on-the-episode seeker due to the
reward-on-the-episode seeker's speed advantage. Or it could be that SGD
will typically build a reward-on-the-episode seeker first, but that
model will be relentlessly ground down into a schemer due to SGD's
hunger for simpler goals.
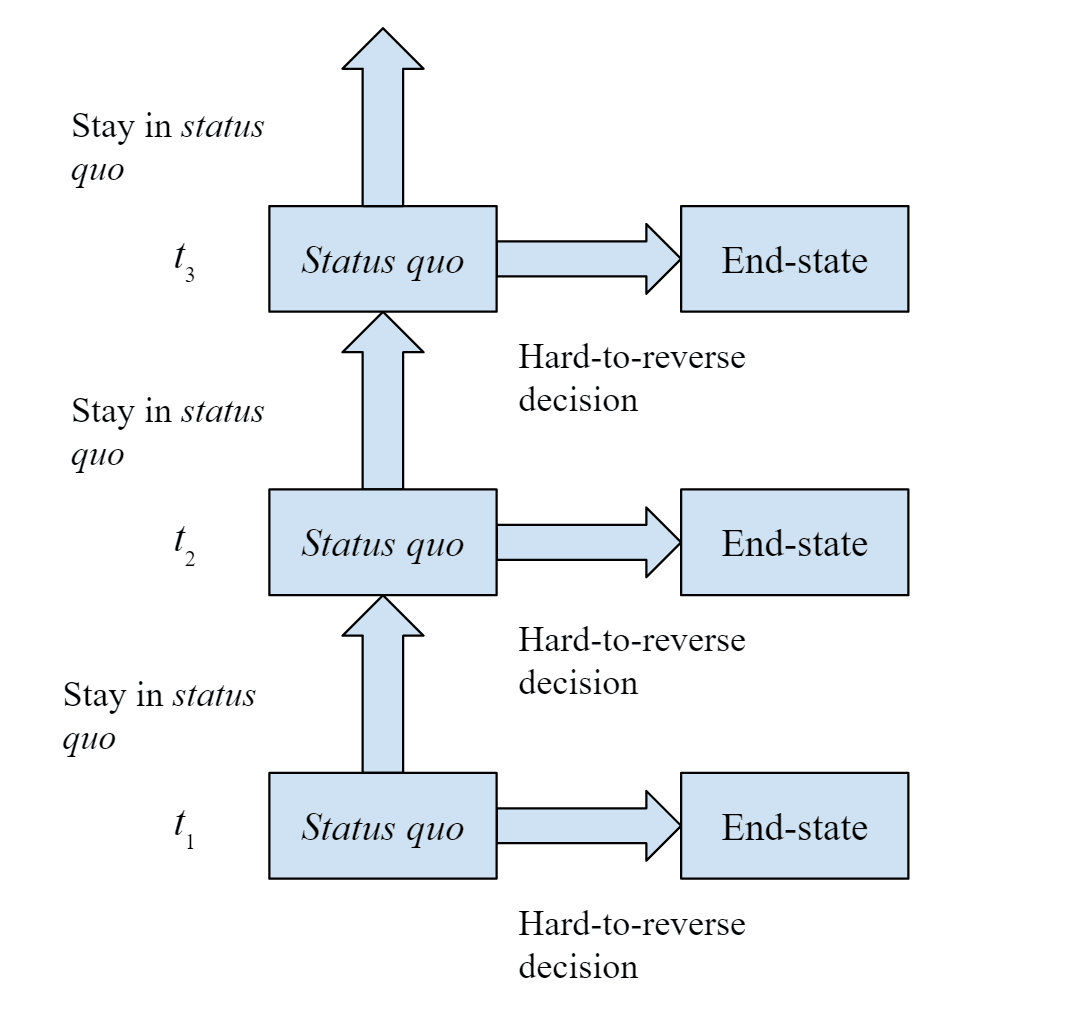
In this section, I'll be assuming that this sort of thing doesn't
happen. That is, the order in which SGD builds models can exert a
lasting influence on where training ends up. Indeed, my general sense is
that discussion of schemers often implicity assumes something like
this – e.g., the thought is generally that a schemer will arise
sufficiently early in training, and then lock itself in after that.
The training-game-independent proxy-goals story
Recall the distinction I introduced above, between:
-
Training-game-independent beyond-episode goals, which arise
independently of their role in training-gaming, but then come to
motivate training-gaming, vs.
-
Training-game-dependent beyond-episode goals, which SGD actively
creates in order to motivate training gaming.
Stories about scheming focused on training-game-independent goals seem
to me more traditional. That is, the idea is:
-
Because of [insert reason], the model will develop a (suitably
ambitious) beyond-episode goal correlated with good performance in
training (in a manner that doesn't route via the training game).
-
This could happen before situational awareness arrives, or
afterwards.
-
If before, then there's some period where it might get
trained out, and where it doesn't yet motivate
training-gaming.
-
If after, it might start motivating training-gaming
immediately.
-
Then, in conjunction with situational awareness, this (suitably
ambitious) beyond-episode goal will start to motivate
training-gaming.
Call this the "training-game-independent proxy-goals story."
I take this argument fairly seriously. If some sort of
suitably-ambitious beyond-episode proxy goal falls out of training
(either because it doesn't get trained away prior to situational
awareness, or because it pops up after situational awareness), and if
some story about why this goal makes scheming a good instrumental
strategy applies (e.g., the classic goal-guarding story, or potentially
some other non-classic story), then it does seem like scheming could
just be a thing that happens.
I think the most immediate objection is: why did the model develop these
(suitably ambitious) beyond-episode goals? I discussed this earlier, in
the context of arguments like "goals don't come with temporal discounts
by default" and "model time won't be like calendar time," and I won't
add much here, except to say that an assumption that the model will land
on some suitably ambitious, beyond-episode, training-game-independent
proxy goal, pursuit of which correlates with high reward, seems to me
one of the weaker parts of the classic story.
In particular: discussions of scheming sometimes focus on proxy goals
like "curiosity" and "power" that show up as useful in lots of episodes.
But that doesn't mean that pursuing curiosity and power beyond the
episode is incentivized in training. What's more, and especially if you
know/can control when situational awareness arises, it doesn't seem all
that hard to put in training episodes where a model is actively
penalized for pursuing curiosity/power. And a non-training-gaming model
will just go for it and get modified. Indeed, in general, I expect us to
be doing quite a lot to actively discourage models from taking
power-seeking-ish actions, and to encourage other forms of "modesty."
This latter point is connected to the reason for optimism I mentioned
earlier: namely, that the training-game-independent proxy goals story
allows us to do whatever adversarial training we want prior to
situational awareness in order to try to ensure that a model's goals
remain within-episode and suitably modest.
That said, trying to ward off this path to scheming via adversarial
training prior to situational awareness faces a few serious obstacles:
-
First: and most importantly, the adversarial training in question
might not be diverse/thorough enough. In particular (and especially
absent interpretability tools): it may be too difficult to think of
all the possible suitably-ambitious beyond-episode proxy goals that
correlate well enough with reward, and that you need to use such
training to push back on.[3]
-
Second: you might not know, or be able to control very well, when
situational awareness kicks in.
-
Third: once a smart-enough model has been pre-trained on
text-prediction, it might be quite close to situational awareness
already, since it has so much of the relevant general knowledge
(even if not necessarily the self-locating knowledge). So there
might not be much time for
adversarial-training-without-situational-awareness after that point.
-
Finally, it's possible for a model to develop suitably-ambitious,
beyond-episode, scheming-motivating goals after situational
awareness has kicked in.[4]
-
For example, perhaps the model is already quite smart and
strategically aware by the time it starts "reflecting" in the
sense I described above – e.g., "figuring out what it really
wants," ironing itself out, learning new things that break
previous attempts to align it, and so on. (This requires that
the model didn't immediately start seeking reward-on-the-episode
as a result of getting situational awareness, but this seems
possible, especially if we assume that training leaves
significant "slack.")
-
Of course, there's still a question of why the model irons
itself out into something with suitably-ambitious,
beyond-episode goals in particular. But here, per my discussion
of "what if you train it to have long-term goals" above, perhaps
we can appeal to the fact that we were trying to point it at an
ambitious long-horizon task, and this pointing was somewhat
inaccurate/hazy, such that when it figured out how it wanted to
generalize, this generalization landed on something sufficiently
long-term and ambitious as to motivate scheming.
-
Indeed, as I noted above, I think there's a case to be made that
current alignment work is already trying to point our systems
at long-horizon, beyond-episode goals – e.g., forms of
"harmlessness" that avoid helping with bomb-making even if the
bombs won't go off for decades.
So overall, I think that conditional on scheming being a good
instrumental strategy for pursuing (suitably-ambitious) beyond-episode
goals, the training-game-independent proxy-goals story seems to me like
a real concern.
The "nearest max-reward goal" story
We can also tell a different story, focused on training-game dependent
beyond-episode goals. I'll call this the "nearest max-reward goal"
story.[5] Here, the story goes:
-
By the time the model becomes situationally aware, it probably won't
be pursuing a max-reward goal (that is, a goal pursuit of which on
the training data leads to roughly the maximum reward consistent
with the model's other capabilities). Rather, it will be pursuing
some less-than-max-reward proxy goal.
-
But at that point, the world-model will contain all the information
the model needs in order to training-game. (However, because we're
here focused on "training-game-dependent" stories about scheming,
we assume that at the point of getting situational awareness, the
model's goal is not yet such that it will motivate
scheming – rather, some further modification would be required for
that.)
-
The easiest way for SGD to modify the model into getting maximum
reward, at that point, will be to make it a schemer.
-
So: SGD will make the model a schemer.
Now, one option, here, is to try to make (1) false. Indeed, as discussed
above, trying to shape a model's goals in good ways prior to situational
awareness seems like a key potential avenue for reducing the probability
of scheming. Note, though, that in this case, the challenge at stake is
harder than with training-game-independent proxy goals. That is, with
training-game-independent proxy goals, one only needs to avoid giving
the model a schemer-like goal prior to situational awareness, so it is
tolerant of other ways the goal in question might not yet be
max-reward. By contrast, in the context of the "nearest max-reward goal"
argument, one needs to either actually create a max-reward,
non-schemer-like goal, or to get near enough to one that (3) doesn't
apply. That is, you can't just prevent "natural scheming" from arising;
you need to make it the case that when SGD later "goes searching" for
the nearest max-reward goal, it doesn't find a schemer first.
For now, let's assume that we haven't fully mastered this, and (1) is
true (though: the degree of mastery we've attained matters to the
"nearness competitions" I'll discuss below). And (2) follows from the
definition of situational awareness (or at least, a loose definition
like "that understanding of the world necessary to engage in, and
recognize the benefits of, scheming"), so let's grant that as well.
But what about (3)? Here, I think, the argument has more work to do. Why
think that making the model into a schemer will be the easiest way to
cause it to get max reward? For example, why not instead make it into a
training-saint, or a reward-on-the-episode seeker, or a misgeneralized
non-training-gamer pursuing some max-reward proxy goal? By hypothesis,
the model has the conceptual tools to represent any of these goals.
(And note that in this respect, it differs from e.g. humans for most
evolutionary history, who didn't have the conceptual tools to
represent goals like "inclusive genetic fitness".) So we need a story
about why the argument privileges schemer-like goals in particular.
For clarity: when I talk about the "ease" with which SGD can make a
certain modification, or about the "nearness" of the resulting model,
this is a stand in for "the sort of modification that SGD 'prefers' ",
which is itself a stand-in for "the sort of modification that SGD will
in fact make." At a mechanistic level, this means something roughly
like: the direction of the steepest gradient in the reward landscape.
And I'll often imagine a hazier sense in which SGD has a limited budget
of "work" it can do, and so wants to do as little "work" in modifying
the model's goals as it can, so that it can focus on improving other
aspects of the model's cognition.
On this understanding of "ease," then, which model class should we
expect it to be "easiest" for SGD to create, out of a
newly-situationally-aware model with a less-than-max-reward proxy goal
that wouldn't motivate scheming on its own?
As a loose analogy to help prompt intuition: imagine freezing human
technology at current levels, and letting evolutionary selection run on
humans for a vastly longer period of time.[6] What sorts of humans
(or human-descended-creatures) do you expect to dominate in the longer
term? In particular: would you expect:
(a) humans who intrinsically value something like "inclusive genetic
fitness" or "my
genes getting selected for by evolution" (this is a loose analogy
for some combination of "the specified goal" and "the reward
process"),
(b) humans who value something else very closely correlated with
inclusive genetic fitness (e.g., "having as many kids as possible"),
but who aren't explicitly optimizing for inclusive genetic fitness
even instrumentally (this is a loose analogy for mis-generalized
non-training-gamers), or
(c) humans with long-term goals who are optimizing for inclusive genetic
fitness specifically as a method for gaining power for their values
in the longer-term (this is a loose analogy for schemers).
Here, the analog of the "nearest max-reward goal" story would ask
something like: what is the smallest modification to existing human
values (or better: the easiest modification for evolution in particular
to make) that land us in one of the buckets above, while also being
compatible with the amount of evolutionary selection pressure at
stake?[7]
Of course, the analogy brings in tons of confounding variables (for
example, related to the fact that evolution selects over
genomes-that-build-brains-that-learn-values rather than values
themselves, the role of cultural accumulation and memetic selection in
human population dynamics, the lack of a clear analog of a future chance
for escape/takeover, and so on). To make the analogy one step more
analogous to ML, it would be best to imagine evolution selecting
directly over entire human brains, equipped with the full conceptual
apparatus to represent all of these goals, rather than on
genomes-that-build-brains. And even better to imagine a version of
evolution that selected on brains from the get-go, such that human
values at the point we came to understand evolution might be quite
different. And regardless, I don't feel any clear conviction about the
best prediction. But I think it's an evocative intuition pump for the
"nearest max-reward goal" argument.
Barriers to schemer-like modifications from SGD's incrementalism
Let's focus, though, on the actual argument, rather than the analogy.
Which model class should we expect to be "nearest" in the relevant
sense?
Above I discussed one way schemers might get ruled out fast, here:
namely, if SGD can't "notice" the benefits of a schemer-like
modification via the gradients it follows in modifying the model. That
is, as I discussed earlier, in searching out a max-reward goal, SGD
doesn't just get to "hop" to the nearest one. Rather, it needs to
incrementally move towards such a goal, on the basis of gradient
calculations that show that tiny changes to the model's weights, in the
relevant direction, would increase reward. And in many cases, it's not
clear that schemer-like modifications could work like that.
Thus, for example,
Hubinger (2022)
considers an example where SGD induces scheming by modifying a model
from caring about gold coins on the episode to caring about gold coins
over all time. In the example in question, though, it's not that SGD
e.g. gradually lengthens the time horizon of the model's
gold-coin-concern, with each lengthening resulting in an improvement of
reward. Rather, SGD just makes "one simple change" – namely, dropping
the goal's temporal restriction entirely – and thereby creates a
schemer. But the question is: does the gradient in reward-space reflect
the benefit of doing this? The most natural way for this to happen, to
my mind, is if there is some ability to smoothly transition from one
model to the other, such that each modification incrementally gets more
of the benefits of scheming. But it's not clear that this can happen.
And as I discussed earlier, if we assume that SGD also needs to build a
lot of new machinery to perform the sort of instrumental reasoning that
scheming requires (as opposed to just redirecting the pre-existing
"goal-achieving engine"), the task becomes even more challenging.
Which model is "nearest"?
However, per my discussion earlier, I also don't feel like I'm in a
position to rule out the possibility that incremental transitions of
this type could occur (e.g., perhaps a sufficiently high-dimensional
space allows SGD to "find a way"), and I haven't attempted an in-depth
analysis. So while I think that incrementalism of this type offers a
relatively strong objection to stories focused on
training-game-dependent schemer-like goals, I think it's worth
evaluating the other aspects of those stories as well. That is,
supposing that SGD can notice the benefits of making the model in the
"nearest max-reward goal" story into a schemer, would such a
modification be the easiest way to get high reward?
The common-ness of schemer-like goals in goal space
One argument for this comes back to what I see as one of the core
intuitions in favor of expecting scheming: namely, the sheer number of
possible schemer-like goals. Roughly, the idea is that because so many
goals can motivate scheming, it's likely that there will be some
schemer-like goal very nearby to the model's current goal (where
"nearby," recall, is defined in terms of the amount of work SGD has to
do to cause a modification of the relevant kind). That is, schemers are
very common in goal-space – so schemer-like goals are correspondingly
easy for SGD to "find" from any given starting point.[8]
The "gold coins on the episode" → "gold coins over all time" transition
described above is one illustration of this sort of thought. That is, if
you work with the assumption that most sufficiently long-term goals will
motivate scheming,[9] then the most salient way to not be a schemer
is to have a sufficiently short-term goal. But (assuming we have set
aside the "incrementalism" problems discussed above), any given
temporally-limited goal seems quite "nearby" to a temporally-unlimited
version.[10]
But temporal scope isn't the only source of possible "near-ness," here.
For example, if the model happens to have some long-term goal that
doesn't yet motivate scheming (for example, because the goal isn't
suitably "ambitious"), we can vary other relevant variables instead.
Thus, if the model starts out caring about solving some math problem
correctly in a not-temporally-limited way, but it can solve the problem
well enough on the episode that plotting to take over the world to get
more compute to check and re-check its answer doesn't seem worth it, we
might imagine SGD e.g., changing the model's tolerance for the risk of
getting the answer wrong, or changing its goal such that it wants to
solve more math problems, or what have you. The general point is just:
in trying to create a schemer, SGD has a ton of options to choose from,
so it's easy to find one in the broad vicinity of the model's starting
point.
Thus, in the context of evolution and humans, the analogy for this
thought would be something like: it's comparatively easy to take even
fairly short-term, modest human values and turn them into long-term,
ambitious values instead. Human longtermists, for example, plausibly
take values like "be vaguely nice and helpful to the people in my
immediate environment who meet various conditions" and turn them into
much more ambitious goals – goals that would plausibly have an incentive
to explicitly optimize for getting selected-by-evolution, if this was a
key bottleneck on future power. And indeed, it does seem plausible to me
that in practice, if you ran evolutionary selection for a long enough
time, ideological groups that optimize over long time horizons would end
up dominating (many of the groups that have come closest to optimizing
for reproductive fitness, for example, seem like they have something of
this flavor).[11]
Once we've set aside objections about incrementalism above, I see the
common-ness of schemer-like goals in goal space as a fairly strong
reason to worry that the nearest max-reward modification of a
newly-situationally-aware, still-not-max-reward-goal-pursuing model will
be towards scheming. And what's more, note that once we're imagining SGD
actively searching in goal space for
goals-that-would-motivate-scheming, our stories about the origins of
scheming can be more tolerant of schemer-like goals having to have other
more specific properties, like resource-hungry-ness. That is, in a
setting focused on training-game-independent goals, it's possible to
question the probability of SGD alighting on a schemer-like goal (even
conditional on it alighting on a beyond-episode goal more generally), in
virtue of different beyond-episode goals implying different appetites
for future power, risk, and so on. But in a training-game-dependent
setting like this one, SGD is actively seeking out such goals (and the
relevant goals are still plausibly quite common in goal-space – e.g.,
you can "maximize instances of x over all of space and time" for many
values of x). So no surprise if SGD finds what it's looking for.
However, I don't think this sort of argument is decisive, for two
reasons.
The nearness of non-schemer goals
The first reason that even if we stick with a pure focus on modifying
the model's goals, and with a "clean goal-directedness" frame (I'll
complicate such a focus below), I think there's a countervailing
"near-ness" consideration that points in favor of at least some
non-schemer goals – namely, that other things equal, it seems more
likely that the model's initial training, prior to situational
awareness, actively points the model in the direction of these
non-schemer goals.
This is clearest with respect to the specified goal, which is rewarded
by training by definition. This means that, even if the model doesn't
end up with exactly the specified goal by the time it becomes
situationally aware, it will plausibly end up with something in the
broad vicinity.
-
Thus, for example, if the model is being trained to maximize gold
coins on the episode, and it ended up learning a goal like "maximize
gold-round-things on the episode" (a goal which isn't quite right,
because some training environments include round gold non-coins), it
seems plausible that the easiest modification for SGD to make, here,
is to make the model into a gold-coins-on-the-episode-getter (that
is, a training-saint). Or at least, "gold-coins-on-the-episode,"
here, seems competitive with "round-gold-things-over-all-time,"
with respect to "nearness."
-
And we might make a similar point with respect to more RLHF-flavored
specified goals. That is, if you're training a model to follow
instructions on the episode in a broadly helpful, honest, and
harmless way (let's say, for simplicity, that your RLHF process only
gives accurate feedback in this respect), then even if it has
learned a somewhat off-kilter concept of e.g. honesty by the time it
becomes situationally aware, improving its conception of honesty
until it better fits the human concept seems competitive, re:
nearness, with more schemer-like motivational modifications like "be
off-kilter-honest over all time in a way that incentivizes planning
to escape human control and seize power."
-
And note, in the context of humans and evolution, that humans do
already value various things closely related to inclusive genetic
fitness – for example, having children, having a flourishing and
powerful family lineage more generally, etc. And if we imagine
evolution selecting on entire human brains, equipped with a
conceptual apparatus that represents "inclusive genetic fitness,"
humans having originally evolved to value something quite close to
inclusive genetic fitness seems easier to imagine.[12]
And note that we can make a similar point about mis-generalized
non-training-gamers here, too, provided that they are pursuing a
max-reward goal (recall that mis-generalized goals can be max reward, on
my definition, provided that the training data in particular never
penalizes them – e.g., they would only be penalized by the reward
process in counterfactual scenarios the model never sees).
-
Thus, for example, imagine a training process that never
distinguishes between a goal like "get gold coins on the episode"
and "get gold things in general on the episode," because all of the
gold things in the training data are coins. And let's say that prior
to situational awareness, our model learns a goal like "get gold
things on the episode, but also sometimes follow your curiosity on
the episode even if it means sacrificing gold things" – a goal which
does OK (but not maximally well) in training due to curiosity not
being a very damaging behavior, and sometimes a helpful one. Here,
it seems like just deleting the model's curiosity drive and focusing
solely on getting gold-things-on-the-episode (a max-reward goal,
even though not the specified goal) is a fairly "nearby"
modification – and one plausibly competitive in "nearness" to e.g.
modifying the model to so that it pursues its
gold-stuff-and-curiosity combo over all time instead.
-
And in the context of humans and evolution, if we imagine that
intrinsically valuing "having as many children as possible" would be
perform very well by the lights of evolutionary selection (even if
it's not exactly what evolution is selecting for), it doesn't seem
very difficult to imagine humans going in this direction.
Can we make a similar point about reward-on-the-episode seekers? It's
somewhat less clear, because prior to situational awareness, it's
unclear whether models will have enough of a concept of the reward
process for their motivations to attach to something "in the vicinity"
of one of its components. That said, it seems plausible to me that this
could happen in some cases. Thus, for example, even absent situational
awareness, it seems plausible to me that models trained via RLHF will
end up motivated by concepts in the vicinity of "human approval." And
these concepts seem at least somewhat nearby to aspects of the reward
process like the judgments of human raters and/or reward models, such
that once the model learns about the reward process, modifying its
motivations to focus on those components wouldn't be too much of a leap
for SGD to make.
Overall, then, I think non-schemer goals tend to have some sort of
"nearness" working in their favor by default. And this is unsurprising.
In particular: non-schemer goals have to have some fairly direct
connection to the reward process (e.g., they are either directly
rewarded by that process, or because they are focused on some component
of the reward process itself), since unlike schemer goals, non-schemer
goals can't rely on a convergent subgoal like goal-content-integrity or
long-term-power-seeking to ensure that pursuing them leads to reward. So
it seems natural to expect that training the model via the reward
process, in a pre-situational-awareness context where scheming isn't yet
possible, would lead to motivations focused on something in the vicinity
of a non-schemer goal.
Still, it's an open question whether this sort of consideration suffices
to make non-schemer goals actively nearer to the model's current goals
than schemer-like goals are, in a given case. And note, importantly,
that the relevant competition is with the entire set of nearby
schemer-like goals (rather than, for example, the particular examples of
possible schemer-like modifications I discussed above) – which, given
the wide variety of possible schemer-like goals, could be a serious
disadvantage. Thus, as analogy: if there are ten Mexican restaurants
within ten miles of Bob's house, and a hundred Chinese restaurants, then
even if any given Mexican restaurant is "plausibly competitive" with any
given Chinese restaurant, re: nearness, then (modulo further
information) the nearest restaurant is still probably Chinese.[13]
And depending on the common-ness of schemer-like goals in model space,
we might expect the schemer-like goals to be like the Chinese
restaurants, here.[14]
The relevance of messy goal-directedness to nearness
However, I also think that non-schemers get another, somewhat distinct
nearness boost once we bring in considerations about "messy
goal-directedness." In particular: if we imagine that the model in
question is not a cleanly separable goal slot + goal-achieving-engine,
but rather a tangled kludge of different heuristics, patterns of
attention, impulses, and so on, then we need to analyze the comparative
"nearness" not just of the current model's current goal to the nearest
schemer-like and non-schemer-like goals, but the nearness of the model's
entire kludge to the nearest schemer and non-schemer-like models. And
here, I think, non-schemer models may have a more significant advantage.
In particular: to the extent that pre-situational-awareness training
tends to create forms of messy goal-directedness pointed at something
in the vicinity of a non-schemer goal – and in particular, a
within-episode non-schemer goal – then this implies that the model's
heuristics, patterns of attention, impulses, and so on will tend to be
pointed in that broad direction as well, and focused within the episode
in particular. And this, to me, makes it seem like a more substantive
and difficult modification to re-orient the model towards longer-term
power-seeking, especially if the episodes in question are quite short.
That is, intuitively, it feels to me like "tweaking a cleanly separable
within-episode goal to make it long-term" is quite a bit easier, for
SGD, than "redirecting a tangled kludge broadly focused on
within-episode things to make it (a) focused on something beyond-episode
instead, and (b) such that this beyond-episode focus back-chains into
getting-reward for instrumental reasons" – especially if (b) requires
building new cognitive machinery for implementing the instrumental
reasoning in question. Whereas "redirecting a tangled kludge focused on
within-episode things to higher-reward within-episode things in the same
broad vicinity instead" (e.g., to gold coins, rather than gold round
things; or to actual honesty, rather than off-kilter honesty) seems to
me intuitively easier.
Overall take on the "nearest max-reward goal" argument
Summarizing my take on the "nearest max-reward goal" argument for
expecting schemers:
-
If SGD can't notice the benefits of turning the model into a schemer
due to incremental modifications not yielding those benefits, then
the argument fails.
-
However, I don't feel like we can bank on SGD being unable to notice
these benefits. And if it can, then I think the common-ness of
schemer-like goals in goal-space makes the possibility that a
schemer-like goal is "nearest" to the model's current goal quite
worrying.
-
That said, because it has been shaped by the reward process in the
absence of situational awareness, the model's goal will also
plausibly be already "in the vicinity" of some max-reward
non-schemer goal as well, which is points in favor of the "nearness"
of some non-schemer model. And to the extent the goal-directedness
at stake is quite "messy," creating such a non-schemer might require
fewer modifications to the model's heuristics, patterns of
attention, instrumental reasoning, and so on.
These considerations leave me with some substantive additional worry
about schemers.
The possible relevance of properties like simplicity and speed to the path SGD takes
Arguments like the "nearest max-reward goal argument" proceed most
naturally if we assume that any given max-reward goal yields
sufficiently good performance in training that SGD isn't especially
fussed about which max-reward goal a model ends up with. But as I
noted above, and as I'll discuss in more detail in the section on final
properties of the different model classes, there are stories on which
SGD actively prefers some of these model classes over others, on grounds
of final properties like simplicity and speed.
What's more, this sort of preference isn't just relevant to predictions
that ignore the path that SGD takes in model space. Rather, they might
influence that path at various stages (even if the final result is
still "path dependent" in some broader sense). Plausibly, for example,
if SGD biases towards simpler goals, this bias could influence the
training-game-independent goals that a model tends to form prior to, or
after, situational awareness, and on a training-game-dependent goal
story, it might be additional points in favor of the SGD's moving
specifically to a schemer-like goal from a not-yet-max-reward starting
point.[15] And similarly, if SGD biases away from schemers in virtue
of their requiring extra reasoning, this bias might be additional points
in favor of expecting SGD to move towards a non-schemer from such a
starting point.
As I'll discuss in
section 4,
on "final properties," I generally think that the speed costs of
scheming are more significant than the simplicity benefits, so other
things equal, I think these sorts of considerations count against
scheming. But it's not clear to me that the costs/benefits in either
direction are especially weighty.
That said, there's at least some case to be made that these
costs/benefits matter more early on in training, because models are
likely to be weaker early on, and so reductions in the sorts of
resources that simplicity and speed make available (e.g., parameters and
compute) will have a larger overall effect on the model's cognitive
power. That is: perhaps, early in training, cognitive resources are more
scarce, and so more necessary to conserve. Thus, for example, perhaps
requiring a model to form a long-term, schemer-like plan is a bigger ask
(and a bigger hit to reward) when it has a smaller budget of
instrumental reasoning in general available; or perhaps, requiring it to
use more parameters storing a more complicated goal is more burdensome
when fewer of its parameters have yet been shaped into useful cognitive
structures.[16] So to the extent one was tempted by the view that
these sorts of costs are likely to be "in the noise" relative to other
considerations (a view I'm tempted by, and which I discuss below), one
might be less tempted by this with respect to early parts of training
than with respect to a model's final properties.
Overall assessment of arguments that focus on the path SGD takes
Overall, though, and despite the possible speed advantages of
non-schemers, I find the combination of the "training-game-independent
proxy goals" argument and the "nearest max-reward goal argument" fairly
worrying. In particular:
-
It seems plausible to me that despite our efforts at mundane
adversarial training, and especially in a regime where we are
purposefully shaping our models to have long-term and fairly
ambitious goals, some kind of suitably ambitious, misaligned,
beyond-episode goal might pop out of training naturally – either
before situational awareness, or afterwards – and then cause
scheming to occur.
-
And even if this doesn't happen naturally, I am additionally
concerned that by the time it reaches situational awareness, the
easiest way for SGD to give the model a max-reward goal will be to
make it into a schemer, because schemer-like goals are sufficiently
common in goal-space that they'll often show up "nearby" whatever
less-than-max-reward goal the model has at the time situational
awareness arises. It's possible that SGD's "incrementalism" obviates
this concern, and/or that we should expect non-schemer models to be
"nearer" by default (either because their goals in particular are
nearer, or because, in a "messy goal-directedness" setting, they
require easier modifications to the model's current tangled kludge
of heuristics more generally, or because their "speed" advantages
will make SGD prefer them). But I don't feel confident.
Both these arguments, though, focus on the path that SGD takes through
model space. What about arguments that focus, instead, on the final
properties of the models in question? Let's turn to those now.
Executive summary: The arguments focus on whether the path that stochastic gradient descent (SGD) takes during training will favor scheming AI systems that pretend alignment to gain power. Key factors include the likelihood of suitable long-term goals arising, the ease of modifying goals towards scheming, and the relevance of model properties like simplicity and speed.
Key points:
This comment was auto-generated by the EA Forum Team. Feel free to point out issues with this summary by replying to the comment, and contact us if you have feedback.